你还在为批量处理大量图片而头疼吗?设计师需要将几百张产品图片统一缩放,运营同学要批量压缩社交媒体素材,开发者要为移动端适配不同尺寸的图标...
今天,我将分享一个完整的C#批量图片处理解决方案,让你1分钟处理1000张图片,彻底告别重复劳动!
🎯 痛点分析:为什么需要批量图片处理?
在实际开发中,我们经常遇到这些场景:
- 电商系统:产品图片需要生成多种尺寸的缩略图
- 移动应用:图标适配不同分辨率的设备
- 网站优化:批量压缩图片提升加载速度
- 内容管理:统一调整图片尺寸和格式
手动处理这些任务不仅效率低下,还容易出错。今天我们就用C#打造一个专业级的批量处理工具!
💡 解决方案:基于SkiaSharp的高性能图片处理
🔧 技术选型
我们选择SkiaSharp作为图片处理库,原因如下:
- 跨平台支持:Windows、Linux、macOS全覆盖
- 高性能:基于Google Skia引擎,GPU加速
- 功能丰富:支持多种图片格式和高质量缩放算法
- 内存优化:自动管理内存,避免内存泄漏
身为C#开发者,你是否遇到过这样的困扰?
用户误删重要数据,没有任何提醒;程序出错了,用户完全不知道发生了什么;想让用户确认某个操作,却不知道如何优雅地实现...
这些问题的根源都指向同一个核心:缺少有效的用户交互机制。在WinForms开发中,MessageBox作为最基础的交互工具,看似简单却蕴含着巨大的潜力。
今天我将分享5个MessageBox的实战技巧,帮你彻底掌握这个"看起来简单,用起来复杂"的组件,让你的应用程序用户体验瞬间提升一个档次!
🎯 痛点分析:为什么你的MessageBox总是"不给力"?
很多开发者对MessageBox的认知还停留在简单的 MessageBox.Show("Hello World") 层面,导致:
- 用户体验差:缺少必要的视觉反馈
- 逻辑处理不当:没有正确处理用户的选择结果
- 界面不够专业:消息提示千篇一律,缺少针对性
💡 5个实战解决方案
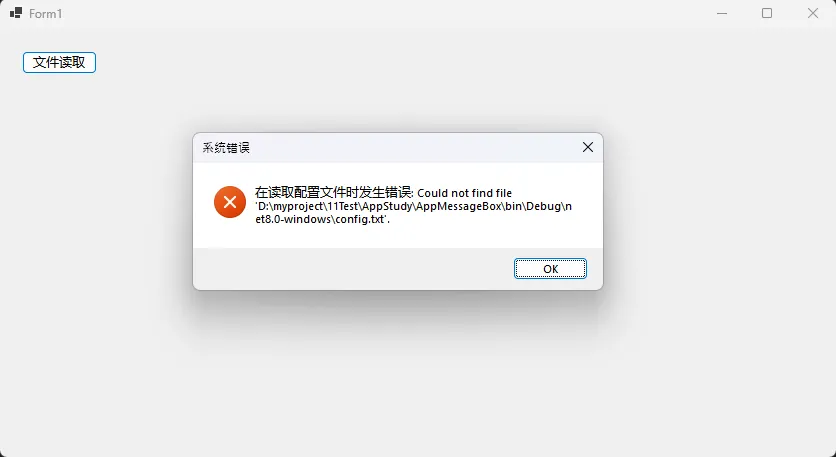
🚀 技巧1:智能化错误提示系统
应用场景:文件操作、数据库连接、网络请求等可能出错的操作
C#using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
namespace AppMessageBox
{
public static class ErrorHandler
{
public static void ShowError(Exception ex, string context = "")
{
string errorMessage = string.IsNullOrEmpty(context)
? $"发生错误: {ex.Message}"
: $"在{context}时发生错误: {ex.Message}";
MessageBox.Show(
errorMessage,
"系统错误",
MessageBoxButtons.OK,
MessageBoxIcon.Error,
MessageBoxDefaultButton.Button1
);
}
}
}
C#using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Drawing;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using System.Windows.Forms;
namespace AppMessageBox
{
public partial class Form1 : Form
{
public Form1()
{
InitializeComponent();
}
private void btnReadFile_Click(object sender, EventArgs e)
{
try
{
// 文件读取操作
string content = File.ReadAllText("config.txt");
}
catch (Exception ex)
{
ErrorHandler.ShowError(ex, "读取配置文件");
}
}
}
}
还在为复杂的报表打印而头疼吗?这个有周末闲着把老早写的一个打印类重写了,好处就是可以用json定义结构了,不过发现写到最后还是有些小麻烦,人也懒了,等有时间再优化吧。Excel导出太慢,Crystal Reports太重,自己画Graphics太复杂?今天分享一个轻量级的C# WinForms表格打印解决方案,让你用JSON配置就能搞定各种复杂的表格打印需求!
这套方案不仅支持动态数据绑定、单元格合并,还能轻松添加二维码和条形码,最关键的是配置简单、性能优秀。无论是物料标签、采购单据还是各种业务报表,都能快速搞定。
🎯 传统打印方案的痛点分析
常见问题汇总
- Graphics绘制繁琐:每个表格都要写一堆坐标计算代码
- Excel导出缓慢:大量数据处理时性能瓶颈明显
- 报表工具笨重:Crystal Reports等需要额外许可费用
- 维护成本高:表格样式调整需要重新编译发布
业务场景需求
实际开发中,我们经常需要打印:
- 物料标签(带条码/二维码)
- 采购订单(动态行数)
- 出库单据(复杂表头)
- 质检报告(数据格式化)
🚩 基本流程
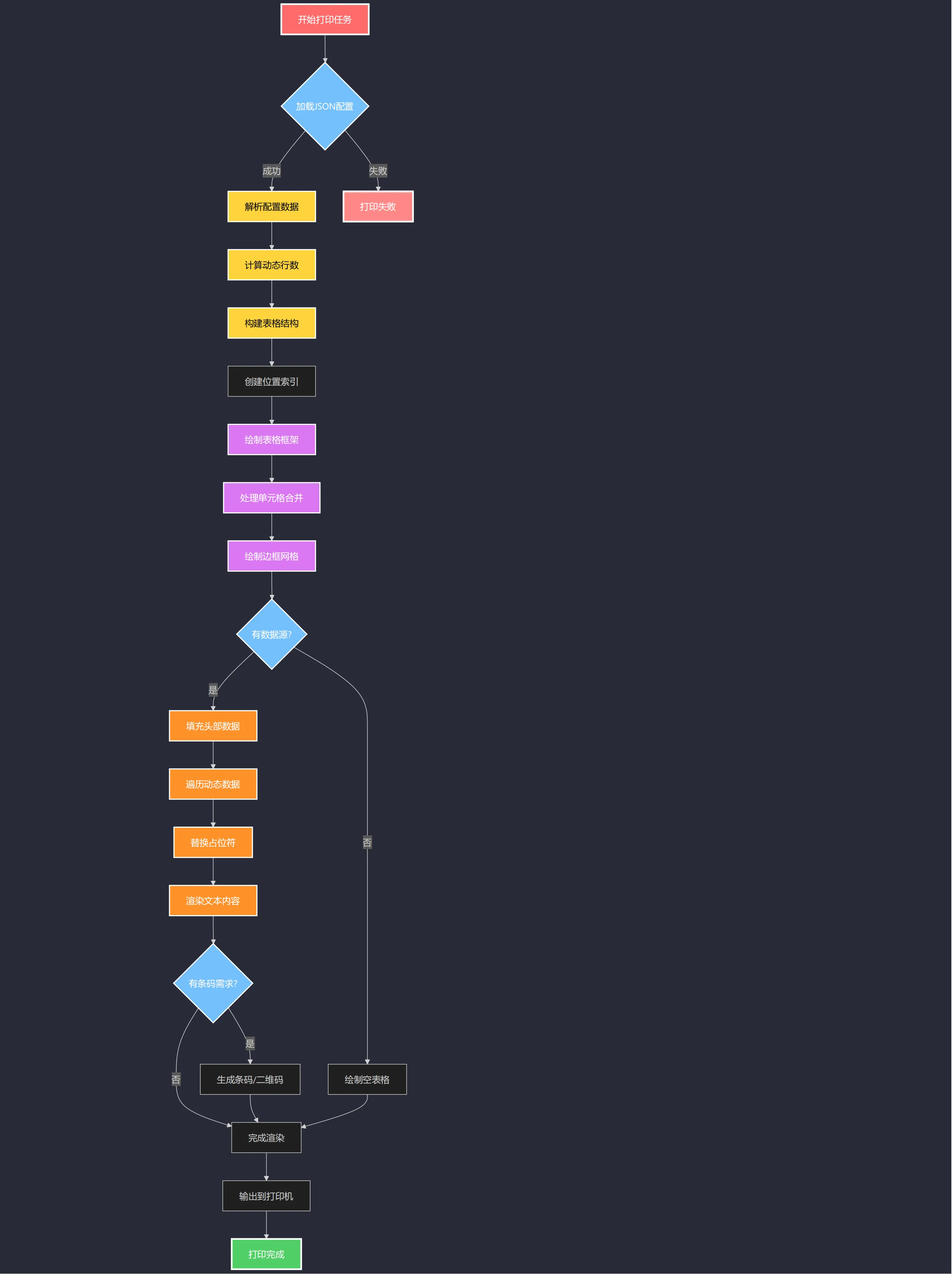
💡 JSON配置驱动的解决方案
🔧 核心设计理念
这套方案采用配置与逻辑分离的设计思路:
- JSON配置文件:定义表格结构、样式、数据绑定
- 渲染引擎:负责解析配置并绘制表格
- 数据适配器:处理动态数据和占位符替换
在企业级开发中,文件传输功能几乎是必备需求。无论是内网文件同步、远程数据备份,还是分布式系统间的文件交换,一个稳定高效的文件传输工具都显得至关重要。
今天就有位开发者私信我:"我需要开发一个文件传输工具,服务端只管接收文件并保存到指定目录,客户端只管发送文件。网上的示例要么功能复杂,要么不够稳定,能否提供一个完整的解决方案?"
相信很多朋友都遇到过类似需求。今天我们就来彻底搞定这个问题,用C#打造一个功能专一、稳定可靠的网络文件传输工具!
🎯 需求分析:明确功能边界
核心痛点
- 功能臃肿:市面上的传输工具功能过于复杂,维护成本高
- 稳定性差:网络异常、大文件传输时容易出现各种问题
- 用户体验:缺少进度显示、速度计算等基础交互功能
- 部署复杂:配置繁琐,不够傻瓜式
设计目标
我们的解决方案要做到:
- 职责清晰:服务端专门接收,客户端专门发送
- 界面友好:实时进度、速度显示、状态提示
- 异常处理:网络中断、文件冲突等场景的优雅处理
- 即插即用:最小化配置,开箱即用
🔧 架构设计:分层解耦的经典模式
整体架构
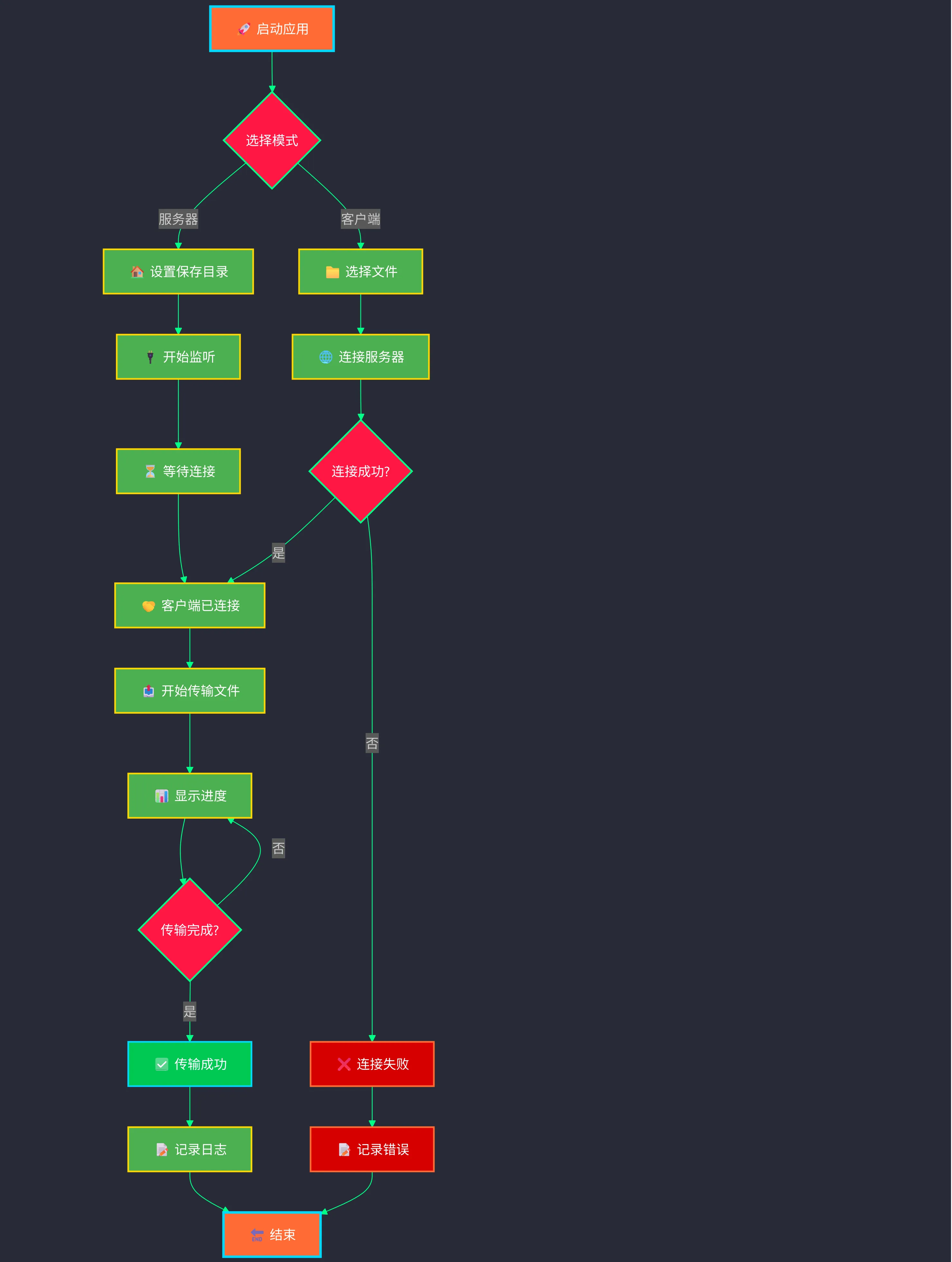
核心组件
- FileTransferServer:服务端核心类,负责监听和接收
- FileTransferClient:客户端核心类,负责连接和发送
- TransferEventArgs:事件参数类,统一状态通知
- FrmMain:UI主窗体,用户交互界面
作为.NET开发者,你是否遇到过这样的痛点:高并发场景下消息处理变得缓慢,传统的队列机制成为性能瓶颈?当订单量激增时,系统响应变得迟缓,用户体验直线下降?
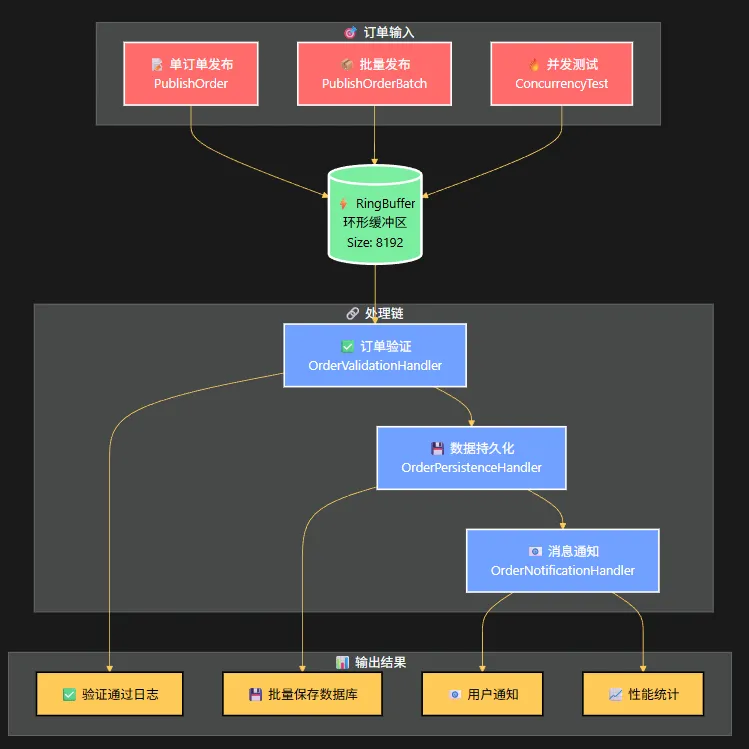
今天我要为你介绍一个性能怪兽级的解决方案——Disruptor-net,这个来自金融交易系统的高性能消息传递框架,能够让你的应用处理能力提升10倍以上!让我们通过一个完整的订单处理系统,看看如何用它打造极致性能的消息处理架构。
🔍 传统消息队列的性能陷阱
常见问题分析
队列阻塞问题:传统的BlockingQueue在高并发时会产生大量锁竞争
内存分配开销:频繁的对象创建和垃圾回收影响性能
缓存失效:数据在CPU缓存中的局部性差,导致频繁的缓存未命中
线程切换成本:过多的线程同步操作带来额外开销
这些问题在订单处理、实时数据分析等高频场景中尤为突出,往往成为整个系统的性能瓶颈。
💡 Disruptor-net:无锁并发的性能革命
🎯 核心优势
- 无锁设计:通过Ring Buffer和CAS操作避免锁竞争
- 缓存友好:连续内存布局提升CPU缓存命中率
- 批处理优化:支持批量事件处理减少系统调用
- 零垃圾回收:对象重用机制避免频繁GC
🛠️ 实战:构建高性能订单处理系统