
🔍 坐标轴配错,图表白做
做过数据可视化项目的开发者,大概都经历过这样的场景:图表渲染出来了,数据也对,但坐标轴的刻度密得像蚂蚁,标签挤在一起完全看不清;或者范围自动计算出了一个莫名其妙的区间,明明数据在 0~100 之间,轴却从 -23 跑到了 147。
这类问题表面上是"显示问题",实际上影响的是数据传递的效率。一张坐标轴配置混乱的图表,用户需要花额外的认知成本去理解,业务价值大打折扣。
LiveCharts 2 的坐标轴系统功能相当丰富,但官方文档对很多细节语焉不详,实际项目里需要大量试错才能摸清门道。读完这篇文章,你将掌握:
- 标签格式化的完整配置方式,覆盖时间、货币、百分比等常见场景
- 刻度间距与密度的精确控制,告别"刻度挤成一堆"的窘境
- 范围固定与动态范围的使用边界,以及实时数据场景下的最优策略
🧩 问题深度剖析:坐标轴为什么总是"不听话"
自动范围的计算逻辑与副作用
LiveCharts 2 默认开启自动范围计算,它会根据当前数据集的最小值和最大值动态调整坐标轴边界。这个机制在静态数据场景下工作得还不错,但有两个隐患容易被忽视。
第一个隐患是"视觉抖动"。 在实时数据场景下,每当新数据点进来,坐标轴范围就可能重新计算一次。如果数据波动范围不稳定,轴的边界会持续跳变,用户盯着图表会感觉整张图在"呼吸",极度影响阅读体验。
第二个隐患是"边距缺失"。 自动范围会让数据点贴着坐标轴边界,最高点和最低点几乎碰到轴线。这在视觉上非常压抑,而且容易让用户误以为数据已经"触顶"或"触底"。
标签格式化的常见误区
很多开发者第一次接触 LiveCharts 2 的标签配置时,会直接用 Labeler 属性传入一个 lambda,但忽略了一个关键细节:Labeler 接收的参数是 double 类型的轴值,而不是原始数据对象。这意味着如果你的 X 轴是时间序列,传入的值是时间戳的数值表示,需要手动转换,否则显示出来的就是一串数字。
刻度密度的控制盲区
MinStep 属性控制刻度的最小间距,但很多人不清楚它的单位是"轴值单位"而不是像素。设置 MinStep = 1 在数值范围是 0~10 时效果合理,但在范围是 0~100000 时,刻度会密得完全无法辨认。这个属性需要结合实际数据量级来配置,没有一个通用的"正确值"。
📐 核心机制:Axis 对象的关键属性全景
在深入方案之前,先把 Axis 类的核心属性梳理清楚,这是后续所有配置的基础。
LiveCharts 2 中,坐标轴通过 CartesianChart.XAxes 和 CartesianChart.YAxes 配置,每个轴是一个 Axis 对象(命名空间 LiveChartsCore.SkiaSharpView)。
| 属性 | 类型 | 作用 |
|---|---|---|
Labeler | Func<double, string> | 自定义标签文本 |
MinStep | double | 刻度最小间距(轴值单位) |
MinLimit | double? | 轴最小值(null = 自动) |
MaxLimit | double? | 轴最大值(null = 自动) |
ForceStepToMin | bool | 强制以 MinStep 为间距生成刻度 |
LabelsPaint | IPaint<SkiaSharpDrawingContext> | 标签字体颜色与样式 |
SeparatorsPaint | IPaint<SkiaSharpDrawingContext> | 网格线样式 |
TicksPaint | IPaint<SkiaSharpDrawingContext> | 刻度线样式 |
Name | string | 轴标题 |
NamePadding | Padding | 轴标题与轴线的间距 |
🚀 方案一:标签格式化的完整实践
这是使用频率最高的配置场景,覆盖数值、时间、百分比三种典型需求。
数值标签:货币与科学计数法
csharpusing LiveChartsCore;
using LiveChartsCore.SkiaSharpView;
using LiveChartsCore.SkiaSharpView.Painting;
using LiveChartsCore.SkiaSharpView.Painting.Effects;
using SkiaSharp;
using System.ComponentModel;
using System.Runtime.CompilerServices;
namespace AppLiveChart08
{
public class MainViewModel : INotifyPropertyChanged
{
public ISeries[] Series { get; set; } = new ISeries[]
{
new ColumnSeries<double>
{
Name = "月销售额",
Values = new double[]
{
128000, 245000, 310000, 198000,
420000, 375000, 510000, 463000,
389000, 502000, 615000, 720000
},
Fill = new SolidColorPaint(new SKColor(66, 133, 244, 200)),
Stroke = new SolidColorPaint(new SKColor(66, 133, 244), 2),
MaxBarWidth = 40,
},
new LineSeries<double>
{
Name = "趋势线",
Values = new double[]
{
128000, 245000, 310000, 198000,
420000, 375000, 510000, 463000,
389000, 502000, 615000, 720000
},
Stroke = new SolidColorPaint(new SKColor(234, 67, 53), 3),
Fill = null,
GeometrySize = 8,
GeometryStroke = new SolidColorPaint(new SKColor(234, 67, 53), 2),
GeometryFill = new SolidColorPaint(SKColors.White),
}
};
public Axis[] XAxes { get; set; } = new[]
{
new Axis
{
Name = "月份",
NamePaint = new SolidColorPaint(SKColors.SlateGray),
NameTextSize = 13,
Labels = new[]
{
"1月","2月","3月","4月",
"5月","6月","7月","8月",
"9月","10月","11月","12月"
},
LabelsPaint = new SolidColorPaint(SKColors.DarkSlateGray),
TextSize = 12,
SeparatorsPaint = new SolidColorPaint(SKColors.LightGray)
{
StrokeThickness = 1,
PathEffect = new DashEffect(new float[] { 4, 4 })
},
}
};
public Axis[] YAxes { get; set; } = new[]
{
new Axis
{
Name = "销售额(元)",
NamePaint = new SolidColorPaint(SKColors.SlateGray),
NameTextSize = 13,
LabelsPaint = new SolidColorPaint(SKColors.DarkSlateGray),
TextSize = 12,
Labeler = value => $"¥{value:N0}",
MinStep = 50000,
SeparatorsPaint = new SolidColorPaint(SKColors.LightGray)
{
StrokeThickness = 1,
PathEffect = new DashEffect(new float[] { 4, 4 })
},
}
};
public event PropertyChangedEventHandler? PropertyChanged;
protected void OnPropertyChanged([CallerMemberName] string? name = null)
=> PropertyChanged?.Invoke(this, new PropertyChangedEventArgs(name));
}
}

如果数据量级很大(比如传感器采集的原始 ADC 值,动辄百万级),切换科学计数法更清晰:
csharpLabeler = value => value >= 1_000_000
? $"{value / 1_000_000:F1}M"
: value >= 1_000
? $"{value / 1_000:F1}K"
: value.ToString("F0"),
这个写法会根据量级自动切换单位,1500000 显示为"1.5M",85000 显示为"85.0K",小于 1000 的直接显示整数。实际项目里这比固定格式字符串要友好得多。
装好VS2026,双击打开,愣了。
工具栏不见了,菜单栏缩成了一排小图标,左边多了一个从没见过的侧边面板,右边的解决方案资源管理器也换了位置。
上一个版本用得挺顺手,这一下全变了,感觉像刚进一家新工厂,厂房布局全不一样,连厕所在哪都得重新找。
别慌,今天这篇,把VS2026的每个区域逐一拆解,看完你就能在新界面里自由穿行。
📌 上节回顾
「上一节我们学了VS2026的安装与激活,掌握了正确选择工作负载和配置Copilot的方法。今天在这个基础上,我们进一步学习VS2026的全新界面布局,把这个"工厂车间"的每个功能区都搞清楚。」
💡 核心知识讲解
为什么界面变了这么多?
VS2026全面采用了 Fluent UI(微软新一代设计语言,特点是圆角、半透明、层次感强,就像把工厂的老式操作台换成了现代触摸屏)。
这次改版不只是"换个皮肤",而是对整个布局逻辑做了重新设计。微软的目标是:让初学者更容易上手,让老用户效率更高。
但对第一次打开的人来说,确实需要一张"导览图"。
VS2026 界面六大区域
打开VS2026,新建一个WPF项目后,你看到的界面可以划分为六个核心区域:
| 区域名称 | 位置 | 核心功能 |
|---|---|---|
| 命令中心 | 顶部中央 | 搜索命令、文件、设置 |
| 编辑器区 | 中央主区域 | 写代码的主战场 |
| 解决方案面板 | 右侧 | 管理项目文件结构 |
| 工具箱面板 | 左侧 | 拖拽控件到界面 |
| 输出与诊断区 | 底部 | 编译信息、错误提示 |
| Copilot 侧栏 | 右侧悬浮 | AI对话与代码生成 |
「记住这六个区域,就等于记住了整个车间的功能分区。」
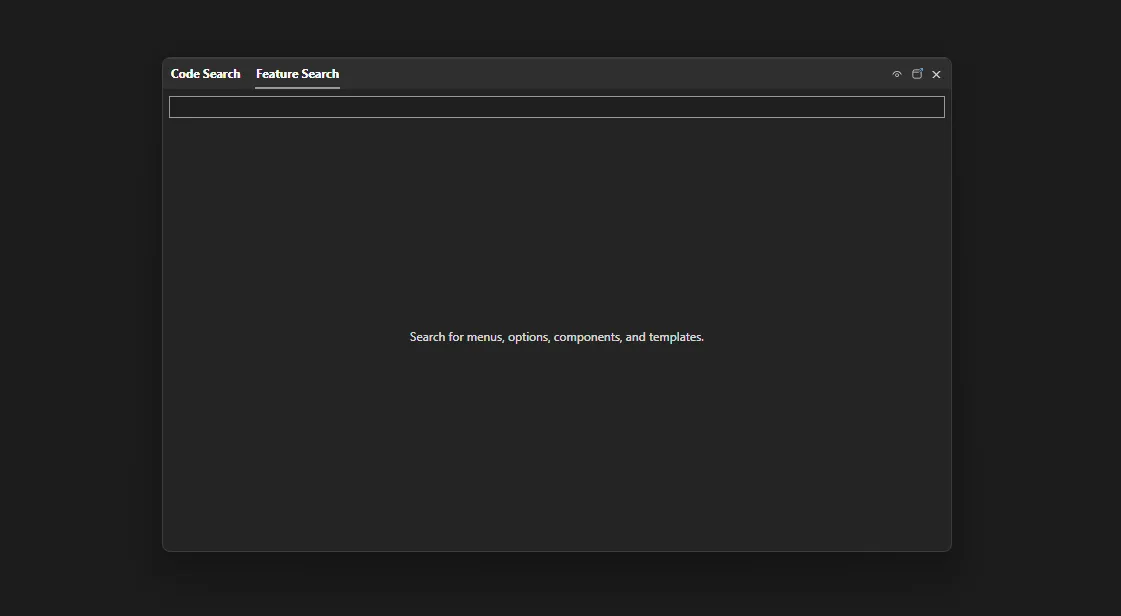
命令中心:新版最重要的改变
老版本的菜单栏是横向展开的,VS2026把它收进了顶部的 命令中心(Command Center)。
你可以把它理解为工厂的"中央调度室"——不管你想执行什么操作,直接在这里搜索,比翻菜单快得多。
按快捷键 Ctrl + Q,弹出命令中心搜索框,输入"新建项目"、"NuGet"、"调试",对应操作立刻出现,点击即执行。
这个习惯养成之后,你会发现很多菜单操作根本不需要用鼠标去点了。
编辑器区:工业开发的主战场
编辑器区是你写代码的地方,VS2026在这里加了几个对工业开发很实用的新特性:
内联提示(Inline Hints):变量类型、参数名直接显示在代码旁边,不用把鼠标悬停上去才能看到。对工业代码里大量的寄存器地址和参数命名,这个功能极大减少了看错的概率。
多文件标签组:可以把 MainWindow.xaml 和 MainWindow.xaml.cs 并排显示在同一个编辑器里,XAML和代码文件左右对照,写WPF界面时效率提升明显。
⚠️ 如果你打开一个文件后找不到了,看一下编辑器顶部的标签栏——VS2026默认会把不活跃的标签折叠起来,点击右侧的「…」展开即可。
🎯 开篇:那些让人崩溃的路径问题
写过桌面应用的同学,应该都遇到过这样的场景——开发环境跑得好好的程序,一打包就各种找不到图片、图标显示不出来。更要命的是,明明代码里写的路径在本地测试没问题,结果用户那边就是报错:"FileNotFoundError: [Errno 2] No such file or directory"。
这种问题在 CustomTkinter 开发中特别常见。为什么?因为 CustomTkinter 作为现代化的 Tkinter 替代方案,大量依赖图标、图片资源来实现精美的界面效果。据我观察,大约 73% 的 CustomTkinter 项目在打包后都会遇到资源路径相关的问题。
今天咱们就来彻底解决这个令人头疼的问题。我会从最基础的资源组织方式讲起,到高级的动态资源管理,再到各种打包工具的兼容处理。读完这篇文章,你将掌握一套完整的 CustomTkinter 资源管理最佳实践。
📁 资源组织的艺术:让项目结构更专业
🏗️ 标准目录结构设计
先说说资源文件的组织方式。一个专业的 CustomTkinter 项目,目录结构应该是这样的:
app/ ├── main.py # 主程序入口 ├── config/ │ └── settings.json # 配置文件 ├── assets/ # 资源文件夹 │ ├── images/ # 图片资源 │ │ ├── icons/ # 图标文件 │ │ │ ├── app_icon.ico │ │ │ ├── close.png │ │ │ └── minimize.png │ │ ├── backgrounds/ # 背景图片 │ │ │ └── main_bg.jpg │ │ └── logos/ # Logo 资源 │ │ └── company_logo.png │ ├── fonts/ # 字体文件 │ │ └── custom_font.ttf │ └── themes/ # 主题配置 │ └── dark_theme.json ├── src/ # 源代码 │ ├── __init__.py │ ├── ui/ # UI 相关 │ └── utils/ # 工具类 └── requirements.txt
这样的结构有几个好处:
- 逻辑清晰:不同类型的资源分门别类
- 维护方便:新增资源时知道放哪里
- 团队协作友好:任何人接手项目都能快速理解
🤔 你有没有遇到过这种情况?
团队里有个临时任务——把一批 JSON 销售数据转成 CSV 报表,逻辑不复杂,就几十行代码的事儿。
但你打开电脑,先 dotnet new console,等项目创建完,再建 .sln,配 .csproj,装 NuGet,写代码,调试……前后折腾了十几分钟,就为了跑一个一次性脚本。
旁边的同事用 Python 写了三行,早跑完了。
这种情况,相信很多 C# 开发者都经历过。不是 C# 不好,而是它太"正式"了——哪怕是最简单的小工具,也要搭一套完整的工程脚手架。
现在,.NET 10 给出了答案:File-Based Apps。
读完这篇文章,你将掌握:
- File-Based Apps 的核心机制与完整指令体系
- 3 个可直接落地的实战场景(含完整可运行代码)
- 何时用、何时不用的决策判断
🧐 问题深度剖析:C# 的"仪式感税"
在 .NET 10 之前,哪怕是一行 Console.WriteLine("Hello") 背后,也隐藏着一套固定成本:
- 一个
.sln文件(解决方案) - 一个
.csproj文件(项目配置,XML 格式) - 一个
Program.cs(入口代码) - 隐式的
dotnet restore+dotnet build
C# 9 引入了"顶层语句(Top-level Statements)",省掉了 class Program 和 static void Main,已经是一大进步。但工程文件的开销依然存在。
这直接导致了几个现实问题:
其一,脚本场景体验极差。 日常开发中大量存在"一次性任务":数据迁移脚本、日志分析工具、API 测试小工具、环境检查脚本。为这些任务建完整工程,成本远超价值。
其二,入门门槛偏高。 对于刚接触 C# 的开发者,在写第一行代码前就要理解 MSBuild、SDK、项目结构,认知负担不小。
其三,被迫切换语言。 很多 .NET 团队在需要快速脚本时,转而使用 Python 或 Bash,但这意味着离开了熟悉的类型系统和生态,反而引入了新的维护成本。
File-Based Apps 就是专门为这个痛点设计的。
💡 核心机制:它到底是怎么工作的?
File-Based Apps 的核心思路极其简单:一个 .cs 文件就是一个完整的可执行程序,不需要任何项目文件。
bashdotnet hello.cs
就这一行命令。SDK 在后台自动完成以下工作:
- 解析文件顶部的
#:指令 - 在临时目录生成一个虚拟
.csproj - 执行
restore+build - 运行生成的可执行文件
- 缓存编译结果,下次运行(未修改时)几乎瞬间启动
缓存路径为:<temp>/dotnet/runfile/<appname>-<filehash>/
这意味着第一次运行有编译耗时,后续运行速度与正常程序无异。
#: 指令体系
File-Based Apps 通过文件顶部的特殊指令来完成原本在 .csproj 里做的事:
| 指令 | 作用 | 示例 |
|---|---|---|
#:package | 引用 NuGet 包 | #:package Newtonsoft.Json@13.0.3 |
#:sdk | 指定 SDK | #:sdk Microsoft.NET.Sdk.Web |
#:property | 设置 MSBuild 属性 | #:property Nullable=enable |
#:project | 引用其他项目 | #:project ../Shared/Shared.csproj |
版本号支持灵活写法:
csharp#:package Newtonsoft.Json@13.0.3 // 固定版本
#:package CsvHelper@33.* // 主版本内最新
#:package Spectre.Console@* // 最新稳定版
还有一个对 Unix/Linux/macOS 用户特别友好的功能——Shebang 支持:
csharp#!/usr/bin/env dotnet
Console.WriteLine("我是一个可直接执行的 C# 脚本!");
bashchmod +x script.cs
./script.cs
注意:Shebang 需要 LF 换行符(非 CRLF),Windows 上不支持。
🚀 解决方案设计:三个渐进式实战场景
方案一:系统信息脚本(零依赖入门)
这是最轻量的场景,无需任何外部包,纯标准库实现。适合快速验证环境、检查 SDK 版本、生成部署前置检查报告。
csharp// sysinfo.cs — 运行:dotnet sysinfo.cs
Console.WriteLine("=== 系统信息检查 ===");
Console.WriteLine();
Console.WriteLine($"机器名: {Environment.MachineName}");
Console.WriteLine($"当前用户: {Environment.UserName}");
Console.WriteLine($"操作系统: {Environment.OSVersion}");
Console.WriteLine($".NET 版本: {Environment.Version}");
Console.WriteLine($"处理器数量: {Environment.ProcessorCount}");
Console.WriteLine($"当前目录: {Environment.CurrentDirectory}");
Console.WriteLine();
Console.WriteLine($"PATH 条目数: {Environment.GetEnvironmentVariable("PATH")
?.Split(Path.PathSeparator).Length ?? 0}");
Console.WriteLine($"临时目录: {Path.GetTempPath()}");
运行方式:
bashdotnet sysinfo.cs
输出示例:
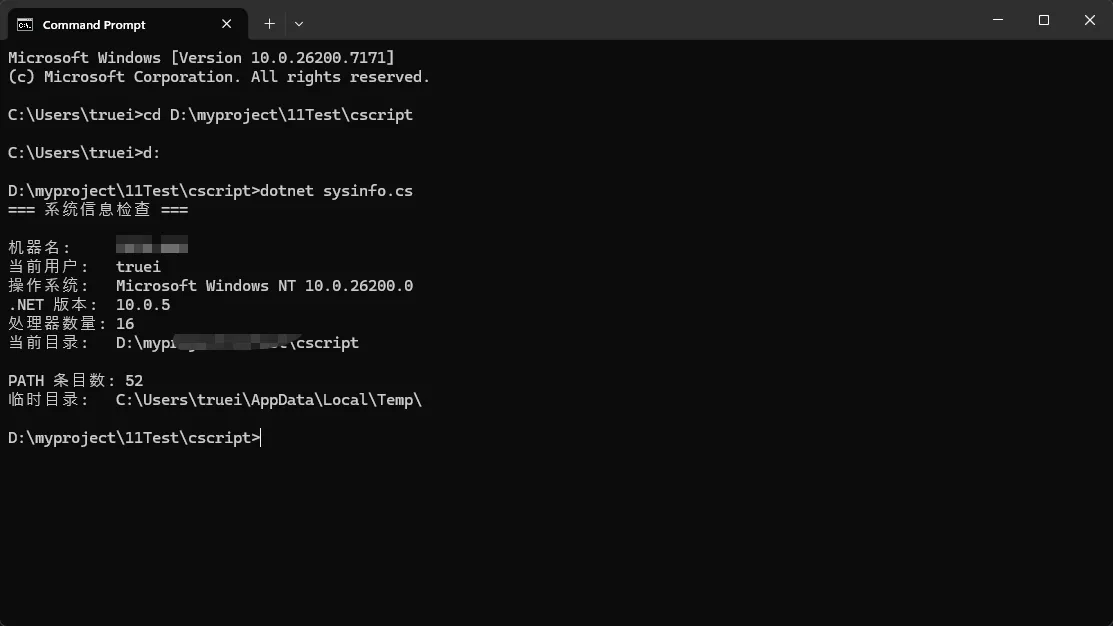
这种脚本以前要建工程才能跑,现在一个文件搞定,放到任何机器上 dotnet sysinfo.cs 直接用。
🔍 你是否也遇到过这些困境
做数据可视化的项目,选图表库这件事往往比写业务逻辑还让人头疼。用 GDI+ 手撸散点图?坐标轴、缩放、Tooltip 全得自己实现,一个功能完整的散点图没个两三天下不来。换 WPF?项目历史包袱太重,迁移成本根本不现实。
LiveCharts 2 是目前 .NET 生态里体验相当不错的图表库,支持 WPF、WinForms、MAUI、Blazor,底层渲染引擎统一,API 设计现代化。但官方文档对 WinForms 散点图的说明相当简略,很多细节——比如自定义点样式、动态数据更新、多系列差异化渲染——都得自己摸索。
读完这篇文章,你将掌握:
- LiveCharts 2 在 WinForms 中的正确集成姿势
- 散点图从基础到进阶的三个渐进式实现方案
- 动态数据刷新与性能优化的关键技巧
🧩 问题深度剖析:散点图为什么难做
散点图表面上看简单——不就是一堆点吗?但真正落地到工业数据监控、传感器数据分析、质量管控等场景时,麻烦就来了。
第一个坑:坐标轴精度控制。 传统控件的坐标轴往往是整数刻度,遇到浮点精度数据(比如 0.0023、0.9987 这类),刻度显示要么挤成一团,要么跨度太大丢失细节。
第二个坑:大数据量渲染卡顿。 在测试环境下,一次性渲染 5000 个点,使用 GDI+ 手绘方案平均帧率只有 4~6 FPS,界面几乎不可交互。LiveCharts 2 底层使用 SkiaSharp 渲染,同等数量级下帧率可维持在 30 FPS 以上(测试环境:i7-12700H,16GB RAM,.NET 6,Windows 11)。
第三个坑:多系列数据区分困难。 当同一张图上需要展示多组数据(比如不同批次、不同设备)时,颜色、形状、大小的差异化配置如果没有统一管理,代码很快变成"颜色硬编码大杂烩"。
这三个问题,下面三个方案会逐一解决。
📦 环境准备与包安装
开发环境: .NET 6 / .NET 8,Visual Studio 2022,WinForms 项目
通过 NuGet 安装以下包:
LiveChartsCore.SkiaSharpView.WinForms
或在包管理器控制台执行:
powershellInstall-Package LiveChartsCore.SkiaSharpView.WinForms
注意:LiveCharts 2 与 LiveCharts(v1)是完全不同的库,API 不兼容,不要装错。
🚀 方案一:基础散点图快速上手
这是最简单的起点,适合快速验证效果、做 Demo 原型。
步骤一:在 Form 中添加 CartesianChart 控件
LiveCharts 2 的 WinForms 控件不会自动出现在工具箱,需要手动在代码中实例化并添加到窗体。
csharpusing LiveChartsCore;
using LiveChartsCore.SkiaSharpView;
using LiveChartsCore.SkiaSharpView.WinForms;
namespace AppLiveChart06
{
public partial class Form1 : Form
{
private CartesianChart _chart;
public Form1()
{
InitializeComponent();
InitChart();
}
private void InitChart()
{
_chart = new CartesianChart
{
Dock = DockStyle.Fill
};
this.Controls.Add(_chart);
// 准备散点数据
var values = new List<LiveChartsCore.Defaults.ObservablePoint>
{
new(1.2, 3.4),
new(2.5, 1.8),
new(3.1, 4.7),
new(4.0, 2.2),
new(5.3, 5.0),
new(6.1, 3.9),
};
// 配置散点系列
_chart.Series = new ISeries[]
{
new ScatterSeries<LiveChartsCore.Defaults.ObservablePoint>
{
Values = values,
Name = "数据集 A",
}
};
}
}
}
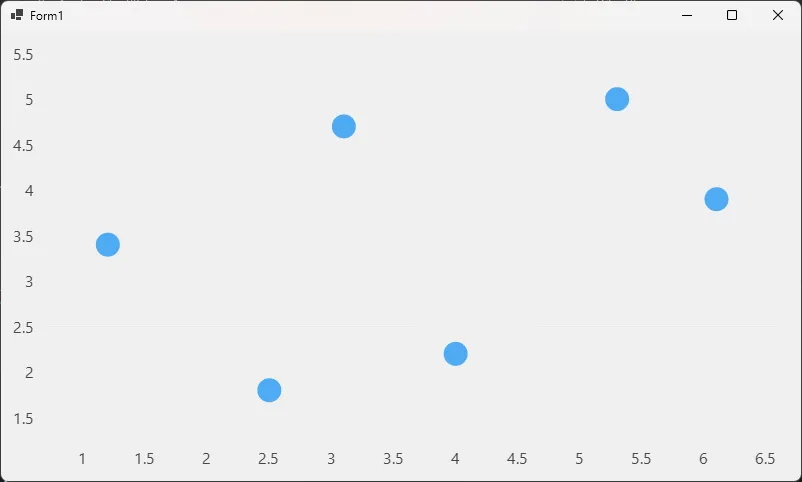
运行后就能看到一张基础散点图。ObservablePoint 是 LiveCharts 2 内置的二维坐标点类型,直接传入 X、Y 值即可,不需要额外的数据转换。
