
Press Ctrl+ and K to search
目录
在工业自动化和精密设备控制领域,运动控制系统是核心技术之一。无论是3D打印机、数控机床,还是自动化生产线,都离不开精确的运动控制。作为C#开发者,你是否想过如何用熟悉的技术栈来构建一个专业级的运动控制系统?
今天就带大家从零开始,用C#和WinForms打造一个功能完整的单轴运动控制器。不仅有完整的运动算法实现,还包含直观的可视化界面和实时动画效果。这不仅是一次技术实战,更是将复杂工业控制概念转化为可理解代码的绝佳案例。
🎯 核心痛点分析
工业控制软件的三大挑战
1. 实时性要求高
运动控制需要毫秒级响应,任何延迟都可能影响精度甚至造成设备损坏。
2. 复杂的运动规划
需要实现平滑的加速度曲线,避免机械冲击,同时保证运动精度。
3. 界面与控制逻辑分离
工业软件往往逻辑复杂,界面更新频繁,如何保持代码清晰和系统稳定是关键。
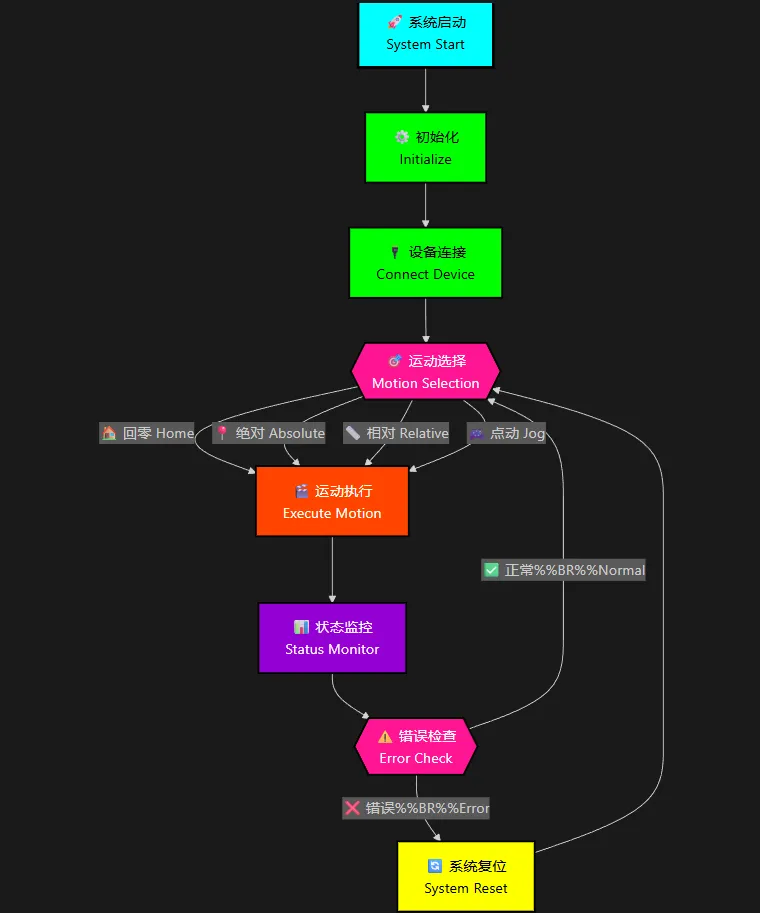
🚩 流程图
🔧 架构设计:分层解耦的智慧
核心类结构设计
我们采用事件驱动 + 异步编程的架构模式:
C#using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
namespace AppSingleAxisMotionControl
{
public class MotionAxis
{
#region 事件定义
public event EventHandler<PositionChangedEventArgs> PositionChanged;
public event EventHandler<StatusChangedEventArgs> StatusChanged;
public event EventHandler<AlarmEventArgs> AlarmOccurred;
#endregion
#region 私有字段
private double _currentPosition = 0;
private double _currentVelocity = 0;
private bool _isConnected = false;
private bool _isHomed = false;
private bool _isMoving = false;
private bool _hasAlarm = false;
private double? _targetPosition = null;
private double _startPosition = 0;
private CancellationTokenSource _moveCancellation;
private System.Threading.Timer _simulationTimer;
private Random _random = new Random();
#endregion
#region 属性
public double CurrentPosition
{
get => _currentPosition;
private set
{
if (Math.Abs(_currentPosition - value) > 0.001)
{
_currentPosition = value;
PositionChanged?.Invoke(this, new PositionChangedEventArgs(value));
}
}
}
public double CurrentVelocity
{
get => _currentVelocity;
private set => _currentVelocity = value;
}
public bool IsConnected => _isConnected;
public bool IsHomed => _isHomed;
public bool IsMoving => _isMoving;
public bool HasAlarm => _hasAlarm;
public double? TargetPosition => _targetPosition;
public double StartPosition => _startPosition;
#endregion
#region 公共方法
public void Connect(string port)
{
if (_isConnected)
throw new InvalidOperationException("设备已连接");
// 模拟连接过程
Thread.Sleep(500);
_isConnected = true;
_simulationTimer = new System.Threading.Timer(SimulationUpdate, null, 0, 50);
StatusChanged?.Invoke(this, new StatusChangedEventArgs("设备已连接"));
}
public void Disconnect()
{
if (!_isConnected)
return;
_simulationTimer?.Dispose();
_simulationTimer = null;
_moveCancellation?.Cancel();
_isConnected = false;
_isMoving = false;
_currentVelocity = 0;
StatusChanged?.Invoke(this, new StatusChangedEventArgs("设备已断开"));
}
public void Home()
{
if (!_isConnected)
throw new InvalidOperationException("设备未连接");
if (_isMoving)
throw new InvalidOperationException("设备正在运动中");
_isMoving = true;
_startPosition = _currentPosition;
_targetPosition = 0;
StatusChanged?.Invoke(this, new StatusChangedEventArgs("开始回零"));
// 模拟回零过程
Task.Run(() =>
{
try
{
SimulateMotion(0, 20, 100, CancellationToken.None);
_isHomed = true;
StatusChanged?.Invoke(this, new StatusChangedEventArgs("回零完成"));
}
catch (Exception ex)
{
AlarmOccurred?.Invoke(this, new AlarmEventArgs($"回零失败: {ex.Message}"));
}
finally
{
_isMoving = false;
_currentVelocity = 0;
_targetPosition = null;
}
});
}
public void MoveAbsolute(double position, double velocity, double acceleration, CancellationToken cancellationToken)
{
if (!_isConnected)
throw new InvalidOperationException("设备未连接");
if (_isMoving)
throw new InvalidOperationException("设备正在运动中");
// 参数验证和日志
if (velocity <= 0) velocity = 10; // 默认值
if (acceleration <= 0) acceleration = 100; // 默认值
// 添加调试信息
Console.WriteLine($"MoveAbsolute: 位置={position:F3}, 速度={velocity:F2}, 加速度={acceleration:F1}");
_isMoving = true;
_startPosition = _currentPosition;
_targetPosition = position;
StatusChanged?.Invoke(this, new StatusChangedEventArgs($"开始绝对运动至 {position:F3}mm,速度{velocity:F1}mm/s"));
try
{
SimulateMotion(position, velocity, acceleration, cancellationToken);
StatusChanged?.Invoke(this, new StatusChangedEventArgs("绝对运动完成"));
}
finally
{
_isMoving = false;
_currentVelocity = 0;
_targetPosition = null;
}
}
public void MoveRelative(double distance, double velocity, double acceleration, CancellationToken cancellationToken)
{
if (!_isConnected)
throw new InvalidOperationException("设备未连接");
if (_isMoving)
throw new InvalidOperationException("设备正在运动中");
double targetPos = _currentPosition + distance;
MoveAbsolute(targetPos, velocity, acceleration, cancellationToken);
}
public void StartJog(double velocity)
{
if (!_isConnected)
throw new InvalidOperationException("设备未连接");
_currentVelocity = velocity;
StatusChanged?.Invoke(this, new StatusChangedEventArgs($"开始点动,速度: {velocity:F2}mm/s"));
}
public void StopJog()
{
_currentVelocity = 0;
StatusChanged?.Invoke(this, new StatusChangedEventArgs("停止点动"));
}
public void Stop()
{
_moveCancellation?.Cancel();
_currentVelocity = 0;
_isMoving = false;
_targetPosition = null;
StatusChanged?.Invoke(this, new StatusChangedEventArgs("急停执行"));
}
public void Reset()
{
_hasAlarm = false;
StatusChanged?.Invoke(this, new StatusChangedEventArgs("报警复位"));
}
#endregion
#region 私有方法
private void SimulateMotion(double targetPosition, double velocity, double acceleration, CancellationToken cancellationToken)
{
double startPos = _currentPosition;
double totalDistance = Math.Abs(targetPosition - startPos);
double direction = Math.Sign(targetPosition - startPos);
if (totalDistance < 0.001)
return;
// 添加调试日志
Console.WriteLine($"SimulateMotion: 起始={startPos:F3}, 目标={targetPosition:F3}, 速度={velocity:F2}, 加速度={acceleration:F1}");
DateTime startTime = DateTime.Now;
// 运动规划计算
double timeToMaxVelocity = velocity / acceleration;
double distanceToMaxVelocity = 0.5 * acceleration * timeToMaxVelocity * timeToMaxVelocity;
bool hasConstantVelocityPhase = totalDistance > 2 * distanceToMaxVelocity;
double actualMaxVelocity;
double totalTime;
double accelTime, constTime, decelTime;
double accelDist, constDist, decelDist;
if (hasConstantVelocityPhase)
{
// 梯形速度曲线
actualMaxVelocity = velocity;
accelTime = decelTime = actualMaxVelocity / acceleration;
accelDist = decelDist = 0.5 * acceleration * accelTime * accelTime;
constDist = totalDistance - accelDist - decelDist;
constTime = constDist / actualMaxVelocity;
totalTime = accelTime + constTime + decelTime;
Console.WriteLine($"梯形曲线: 最大速度={actualMaxVelocity:F2}, 总时间={totalTime:F2}s");
Console.WriteLine($"加速时间={accelTime:F2}s, 匀速时间={constTime:F2}s, 减速时间={decelTime:F2}s");
}
else
{
// 三角形速度曲线
actualMaxVelocity = Math.Sqrt(totalDistance * acceleration);
accelTime = decelTime = actualMaxVelocity / acceleration;
constTime = 0;
accelDist = decelDist = totalDistance / 2;
constDist = 0;
totalTime = accelTime + decelTime;
Console.WriteLine($"三角形曲线: 最大速度={actualMaxVelocity:F2}, 总时间={totalTime:F2}s");
}
// 执行运动仿真
while (Math.Abs(_currentPosition - targetPosition) > 0.001 && !cancellationToken.IsCancellationRequested)
{
double elapsedTime = (DateTime.Now - startTime).TotalSeconds;
double newPosition;
double newVelocity;
string phase = "";
if (elapsedTime >= totalTime)
{
newPosition = targetPosition;
newVelocity = 0;
phase = "完成";
}
else if (elapsedTime <= accelTime)
{
// 加速阶段
newVelocity = acceleration * elapsedTime;
newPosition = startPos + direction * (0.5 * acceleration * elapsedTime * elapsedTime);
phase = "加速";
}
else if (elapsedTime <= accelTime + constTime)
{
// 匀速阶段
double constElapsed = elapsedTime - accelTime;
newVelocity = actualMaxVelocity;
newPosition = startPos + direction * (accelDist + actualMaxVelocity * constElapsed);
phase = "匀速";
}
else
{
// 减速阶段
double decelElapsed = elapsedTime - accelTime - constTime;
newVelocity = actualMaxVelocity - acceleration * decelElapsed;
newPosition = startPos + direction * (accelDist + constDist +
actualMaxVelocity * decelElapsed - 0.5 * acceleration * decelElapsed * decelElapsed);
phase = "减速";
}
// 限制位置范围
if (direction > 0)
newPosition = Math.Min(newPosition, targetPosition);
else
newPosition = Math.Max(newPosition, targetPosition);
CurrentPosition = newPosition;
CurrentVelocity = direction * Math.Abs(newVelocity);
// 输出调试信息
if ((int)(elapsedTime * 10) % 1 == 0)
{
Console.WriteLine($"时间={elapsedTime:F2}s, 阶段={phase}, 位置={newPosition:F3}, 速度={CurrentVelocity:F2}");
}
Thread.Sleep(20);
}
CurrentPosition = targetPosition;
CurrentVelocity = 0;
Console.WriteLine("运动仿真结束");
}
private void SimulationUpdate(object state)
{
if (!_isConnected)
return;
// 模拟点动运动
if (!_isMoving && Math.Abs(_currentVelocity) > 0.001)
{
CurrentPosition += _currentVelocity * 0.05;
// 添加微小的位置抖动以模拟真实系统
CurrentPosition += (_random.NextDouble() - 0.5) * 0.001;
}
// 模拟随机报警
if (_random.NextDouble() < 0.0001)
{
_hasAlarm = true;
AlarmOccurred?.Invoke(this, new AlarmEventArgs("模拟系统报警"));
}
}
#endregion
}
#region 事件参数类
public class PositionChangedEventArgs : EventArgs
{
public double Position { get; }
public PositionChangedEventArgs(double position)
{
Position = position;
}
}
public class StatusChangedEventArgs : EventArgs
{
public string Status { get; }
public StatusChangedEventArgs(string status)
{
Status = status;
}
}
public class AlarmEventArgs : EventArgs
{
public string AlarmMessage { get; }
public AlarmEventArgs(string alarmMessage)
{
AlarmMessage = alarmMessage;
}
}
#endregion
}
🎯 设计亮点:
- 事件驱动:界面与业务逻辑完全解耦
- 属性保护:关键状态只能内部修改,外部只读
- 异步支持:所有运动操作支持取消和超时控制
🚀 核心算法:运动规划的艺术
梯形速度曲线实现
运动控制的核心是速度规划。我们实现了工业级的梯形速度曲线:
C#private void SimulateMotion(double targetPosition, double velocity,
double acceleration, CancellationToken cancellationToken)
{
double startPos = _currentPosition;
double totalDistance = Math.Abs(targetPosition - startPos);
double direction = Math.Sign(targetPosition - startPos);
// 🎯 关键算法:判断是梯形还是三角形曲线
double timeToMaxVelocity = velocity / acceleration;
double distanceToMaxVelocity = 0.5 * acceleration * timeToMaxVelocity * timeToMaxVelocity;
bool hasConstantVelocityPhase = totalDistance > 2 * distanceToMaxVelocity;
if (hasConstantVelocityPhase)
{
// 梯形速度曲线:加速 → 匀速 → 减速
double accelTime = velocity / acceleration;
double accelDist = 0.5 * acceleration * accelTime * accelTime;
double constDist = totalDistance - 2 * accelDist;
double constTime = constDist / velocity;
ExecuteTrapezoidalMotion(accelTime, constTime, accelDist, constDist);
}
else
{
// 三角形速度曲线:加速 → 减速(无匀速段)
double actualMaxVel = Math.Sqrt(totalDistance * acceleration);
double accelTime = actualMaxVel / acceleration;
ExecuteTriangularMotion(accelTime, actualMaxVel);
}
}
💡 算法精髓:
- 自适应曲线:根据距离自动选择梯形或三角形
- 平滑运动:避免机械冲击,保护设备
- 精确控制:毫秒级位置更新,确保精度
实时位置更新机制
C#// 🔥 核心更新循环
private void UpdatePositionLoop(MotionProfile profile, CancellationToken token)
{
DateTime startTime = DateTime.Now;
while (!token.IsCancellationRequested && !IsAtTarget())
{
double elapsedTime = (DateTime.Now - startTime).TotalSeconds;
// 根据当前时间计算位置和速度
var (newPos, newVel) = CalculateCurrentState(elapsedTime, profile);
// 🎯 关键:原子性更新,触发事件
CurrentPosition = newPos;
CurrentVelocity = newVel;
Thread.Sleep(20); // 50Hz更新频率
}
}
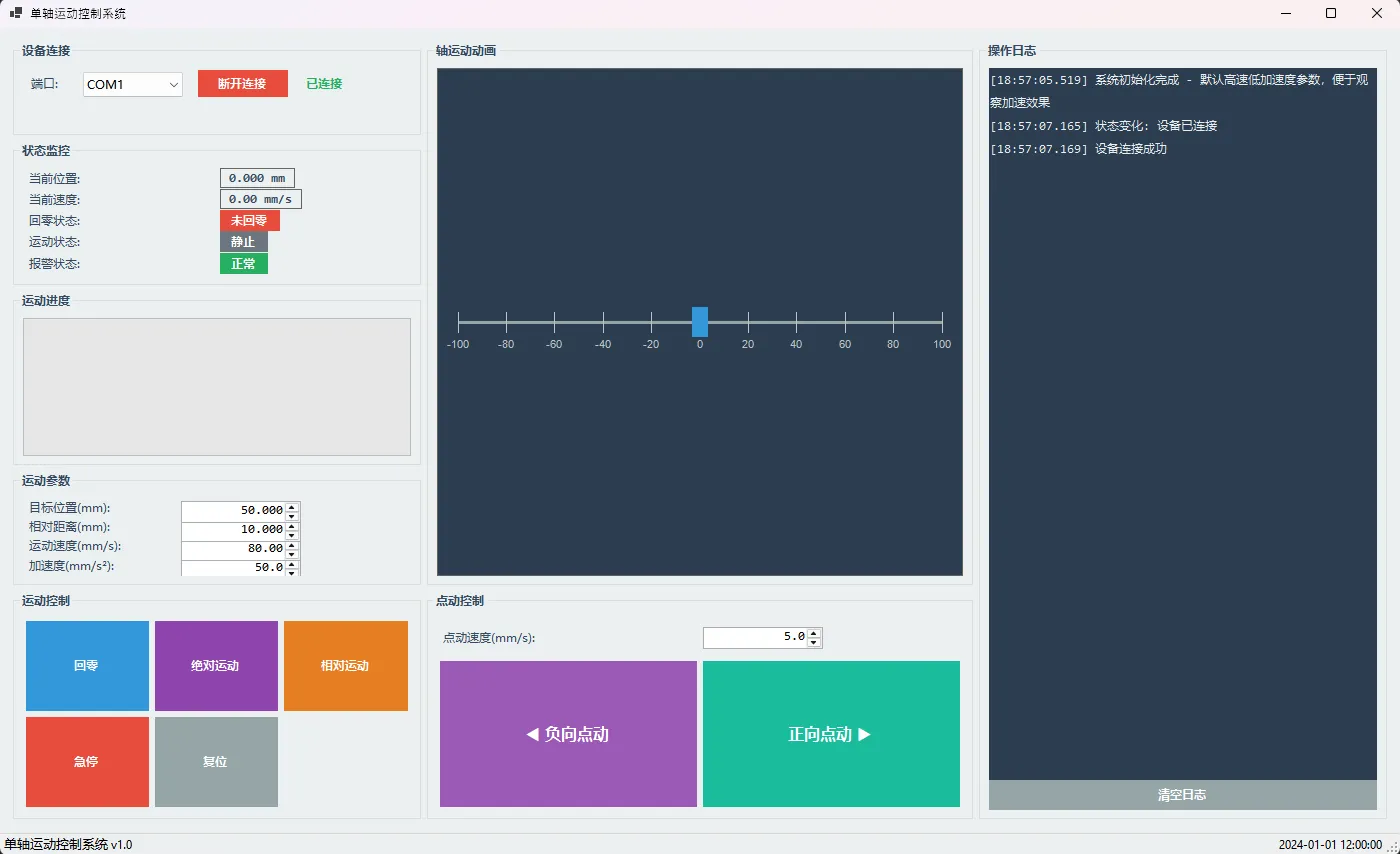
🎨 界面设计:工业级用户体验
智能状态管理
C#private void UpdateUI()
{
bool canOperate = _isConnected && !_isHoming && !_isMoving;
// 🔧 智能按钮控制
btnHome.Enabled = _isConnected && !_isHoming && !_isMoving;
btnMoveAbs.Enabled = canOperate;
btnMoveRel.Enabled = canOperate;
// 📊 状态指示灯
lblHomeStatus.BackColor = _axis.IsHomed ?
Color.FromArgb(39, 174, 96) : Color.FromArgb(231, 76, 60);
lblMotionStatus.BackColor = _axis.IsMoving ?
Color.FromArgb(255, 193, 7) : Color.FromArgb(108, 117, 125);
}
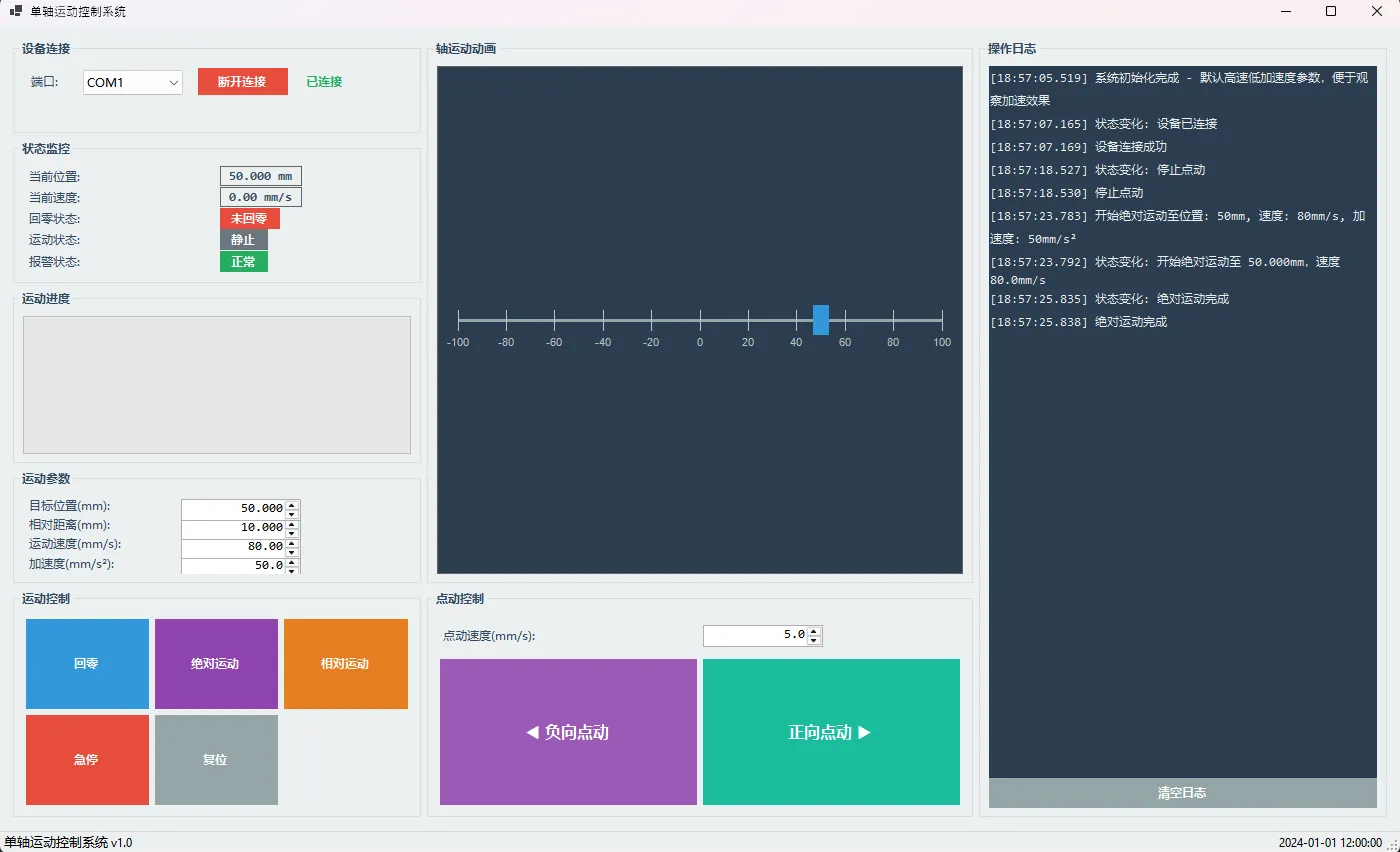
实时动画效果
C#private void DrawAxisAnimation(Graphics g)
{
// 🎨 绘制运动轴动画
Rectangle rect = pnlAnimation.ClientRectangle;
g.Clear(Color.FromArgb(44, 62, 80));
// 绘制轴线和刻度
DrawAxisLine(g, rect);
DrawScale(g, rect);
// 🎯 核心:绘制当前位置
double normalizedPos = (_axis.CurrentPosition + 100) / 200;
int currentX = (int)(20 + normalizedPos * (rect.Width - 40));
using (var brush = new SolidBrush(_axis.IsMoving ?
Color.FromArgb(255, 193, 7) : Color.FromArgb(52, 152, 219)))
{
var posRect = new Rectangle(currentX - 8, centerY - 15, 16, 30);
g.FillRectangle(brush, posRect);
}
// 显示目标位置
if (_axis.IsMoving && _axis.TargetPosition.HasValue)
{
DrawTargetPosition(g, rect);
}
}
⚡ 性能优化:毫秒必争
双缓冲技术
C#// 🚀 关键优化:启用控件双缓冲
typeof(Panel).InvokeMember("DoubleBuffered",
BindingFlags.SetProperty | BindingFlags.Instance | BindingFlags.NonPublic,
null, pnlAnimation, new object[] { true });
线程安全的UI更新
C#private void Axis_PositionChanged(object sender, PositionChangedEventArgs e)
{
// 🔒 线程安全检查
if (InvokeRequired)
{
Invoke(new Action(() => Axis_PositionChanged(sender, e)));
return;
}
// UI更新逻辑
lblCurrentPos.Text = $"{e.Position:F3} mm";
}
🛠️ 实战技巧:踩坑指南
1. 异步操作的正确姿势
C#private async void btnMoveAbs_Click(object sender, EventArgs e)
{
try
{
_moveCancellation = new CancellationTokenSource();
_isMoving = true;
UpdateUI();
// 🎯 正确的异步调用方式
await Task.Run(() => _axis.MoveAbsolute(
position, velocity, acceleration, _moveCancellation.Token));
}
catch (OperationCanceledException)
{
AddLog("运动被用户取消");
}
finally
{
_isMoving = false;
UpdateUI(); // 确保UI状态正确恢复
}
}
2. 资源管理最佳实践
C#private void FrmMainMotionControl_FormClosing(object sender, FormClosingEventArgs e)
{
// 🔧 优雅关闭
if (_isConnected)
{
_axis.Stop(); // 先停止运动
_axis.Disconnect(); // 再断开连接
}
// 释放资源
_updateTimer?.Dispose();
_animationTimer?.Dispose();
_moveCancellation?.Dispose();
}
3. 参数验证与错误处理
C#public void MoveAbsolute(double position, double velocity, double acceleration)
{
// 🚨 参数验证是关键
if (!_isConnected)
throw new InvalidOperationException("设备未连接");
if (_isMoving)
throw new InvalidOperationException("设备正在运动中");
// 设置合理默认值
if (velocity <= 0) velocity = 10;
if (acceleration <= 0) acceleration = 100;
// 执行运动...
}
🎯 三大核心收获
- 事件驱动架构:通过合理的事件设计,实现了界面与业务逻辑的完美分离,代码更清晰,维护更容易。
- 工业级算法:梯形速度曲线不只是理论,在实际应用中能显著提升设备寿命和运动精度。
- 异步编程实践:正确使用async/await和CancellationToken,是现代C#开发的必备技能。
这套运动控制系统不仅展示了C#在工业控制领域的强大能力,更重要的是提供了一套可复用的设计模式。无论是扩展为多轴系统,还是集成到更大的自动化项目中,这些核心思想都能发挥价值。
💬 互动时间:
- 你在项目中遇到过哪些实时控制的挑战?
- 对于运动控制算法,你还有哪些优化想法?
觉得这篇文章对你有帮助吗?请转发给更多需要的同行,让我们一起推动C#技术在工业控制领域的应用!
相关信息
通过网盘分享的文件:AppSingleAxisMotionControl.zip 链接: https://pan.baidu.com/s/1Z5Z0M6RRp5i_e0qacFVwAw?pwd=xbq7 提取码: xbq7 --来自百度网盘超级会员v9的分享
本文作者:技术老小子
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!
目录