你是否遇到过这样的开发痛点:内网环境无法访问外部API,需要通过代理进行调试?或者需要监控团队应用的HTTP请求流量?最近在.NET技术群里,很多开发者都在讨论一个共同问题:"如何快速实现一个灵活可控的HTTP代理服务器?"
据不完全统计,超过70%的企业级应用都需要代理服务器来处理网络请求,但市面上的代理工具要么功能单一,要么配置复杂。今天就带你用C#从零开始,10分钟内搭建一个功能完整的HTTP代理服务器,让你彻底掌握网络代理的核心原理和实现技巧!
💡 为什么要自己开发HTTP代理服务器?
🔍 常见应用场景分析
在实际C#开发中,我们经常遇到这些痛点:
1. 开发环境限制:内网环境无法直接访问外部API
2. 请求监控需求:需要记录和分析HTTP请求数据
3. 访问控制:对特定域名或IP进行过滤
4. 性能优化:缓存频繁请求的响应数据
5. 负载均衡:将请求分发到不同的后端服务器
🛠️ 核心技术方案选型
| 方案 | 优势 | 劣势 | 适用场景 |
|---|---|---|---|
| HttpListener | 简单易用 | 功能有限 | 轻量级代理 |
| Socket编程 | 性能最佳 | 开发复杂 | 高性能场景 |
| ASP.NET Core | 功能丰富 | 资源占用大 | 企业级应用 |
想象一下这个场景:你正在开发一个关键项目,突然网络变慢,但你不知道是哪个应用在偷偷占用带宽。或者你是运维工程师,需要实时监控服务器的网络流量状况。市面上的网络监控工具要么功能过于复杂,要么界面丑陋过时。
今天,我将带你用C#从零构建一个专业级网络流量监控工具,不仅界面美观,功能强大,而且完全可定制。这个项目将帮你掌握网络编程、数据可视化、性能优化等多个技术要点,突然发现正式版的ScottPlot 5.0又变了。。。晕死。
🎯 项目功能预览
我们要实现的功能包括:
- ✅ 实时监控上传/下载速度
- ✅ 动态图表显示历史数据
- ✅ 多网卡接口选择
- ✅ 网络统计信息展示
- ✅ 启动/停止监控控制
🔧 核心技术栈分析
🛠️ 必备NuGet包
XML<!-- ScottPlot:强大的数据可视化库 -->
<PackageReference Include="ScottPlot.WinForms" Version="5.0.0" />
🎨 关键命名空间
C#using ScottPlot; // 图表核心功能
using ScottPlot.WinForms; // WinForms集成
using System.Net.NetworkInformation; // 网络接口操作
using Timer = System.Windows.Forms.Timer; // 定时器
💡 核心架构设计
🏗️ 数据结构设计
C#public partial class Form1 : Form
{
// 定时器和网络接口
private Timer updateTimer;
private NetworkInterface selectedInterface;
private List<NetworkInterface> networkInterfaces;
// 历史数据存储
private List<double> downloadHistory;
private List<double> uploadHistory;
private List<DateTime> timeHistory;
// 基准数据用于计算差值
private long lastBytesReceived;
private long lastBytesSent;
private DateTime lastUpdateTime;
// 数据点控制
private int maxHistoryPoints = 60; // 保留60个数据点(1分钟历史)
// ScottPlot 图表对象
private ScottPlot.Plottables.Scatter downloadPlot;
private ScottPlot.Plottables.Scatter uploadPlot;
}
作为一名资深C#开发者,我在代码审查中遇到过这样的场景:新入职的同事将ProductType、FixtureType、FixtureTemplate三个类全部写在了ProjectType.cs文件里。技术总监看后直接炸了:"这是什么鬼?一个文件一个类,这是基本规范!"
但事实真的是这样吗?最近在Reddit上有一个关于"C#是否应该将多个类放在一个文件中"的热门讨论,收获了800多个点赞和激烈的辩论。有趣的是,支持和反对的开发者几乎各占一半!
这个看似简单的问题,背后却隐藏着团队协作、代码维护、性能优化等多个层面的考量。今天我们就来深入探讨这个争议话题,给出实用的解决方案。
💡 问题深度分析
🔍 为什么会有这个争议?
这个争议的根源可以追溯到1995年Java的设计哲学。当时IDE和静态分析工具还不成熟,Java强制要求一个文件只能有一个public类,文件名必须与类名一致。这个30年前的设计原则,至今仍在影响着我们的编程习惯。
但现在情况不同了:
- 现代IDE拥有强大的导航功能(Ctrl+T快速搜索、F12跳转定义)
- 静态分析工具可以轻松定位任何类
- 编译器和运行时对文件组织方式完全无感
🎭 两个阵营的核心观点
支持派(一个文件多个类)认为:
- 紧密相关的小类放在一起更有逻辑性
- 减少文件数量,降低项目复杂度
- 提高代码的局部性(Locality of Behavior)
我个人习惯这样干 ,不过随着项目的不断CR,维护性也是不断下降,其实也就是人懒:
反对派(一个文件一个类)认为:
- 便于团队协作,减少合并冲突
- 文件命名和组织更加清晰
- 符合单一职责原则(SRP)
🛠️ 实战解决方案
方案一:基于关联度的分组策略
C#// 📁 ProductModels.cs - 推荐做法
namespace ECommerce.Models
{
// 主要的产品类
public class Product
{
public int Id { get; set; }
public string Name { get; set; }
public ProductType Type { get; set; }
public List<ProductAttribute> Attributes { get; set; }
}
// 产品类型枚举 - 仅被Product使用
public enum ProductType
{
Electronics,
Clothing,
Books
}
// 产品属性类 - 仅被Product使用
public class ProductAttribute
{
public string Name { get; set; }
public string Value { get; set; }
}
}
作为一名资深的C#开发者,你是否在转向Java时被一些"看似相同实则不同"的语法细节困扰?变量声明方式的差异、运算符行为的微妙变化、控制流语句的细微区别——这些看似简单的基础语法,往往成为C#开发者学习Java路上的第一道坎。
本文将从基本数据类型、变量声明、运算符和控制流语句四个维度,为你详细对比Java与C#的语法差异,每个知识点都配有实战代码示例和踩坑提醒。让你在15分钟内掌握Java语法基础,告别转型初期的语法迷茫!
🔢 基本数据类型:细节决定成败
问题分析:数据类型看似相同,实则暗藏玄机
许多C#开发者初学Java时,看到int、double、boolean这些熟悉的关键字,以为可以无缝切换。然而,在数据范围、默认值、装箱拆箱等方面,两种语言存在重要差异。
解决方案:掌握核心差异点
💡 方案一:整型数据类型对比
Java代码示例:
Javapackage org.example;
public class DataTypeComparison{
public static void main(String[] args) {
// Java中的基本整型
byte b = 127;
short s = 32767;
int i = 2147483647;
long l = 9223372036854775807L; // 注意L后缀
// 字面量表示
int hex = 0xFF; // 十六进制
int binary = 0b1010; // 二进制(Java 7+)
int underScore = 1_000_000; // 下划线分隔(Java 7+)
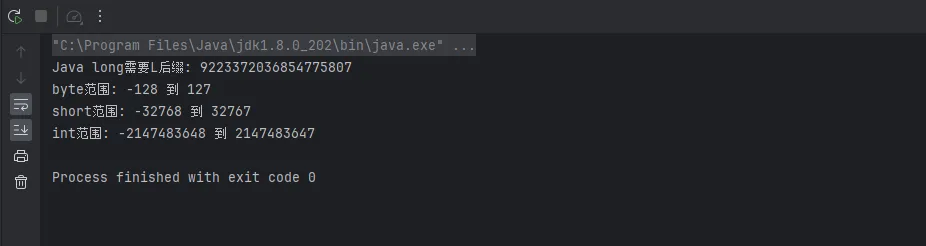
System.out.println("Java long需要L后缀: " + l);
//输出byte最大,最小值
System.out.println("byte范围: " + Byte.MIN_VALUE + " 到 " + Byte.MAX_VALUE);
//输出short最大,最小值
System.out.println("short范围: " + Short.MIN_VALUE + " 到 " + Short.MAX_VALUE);
//输出int最大,最小值
System.out.println("int范围: " + Integer.MIN_VALUE + " 到 " + Integer.MAX_VALUE);
}
}
在工业制造、设备管理等业务场景中,我们经常遇到这样的痛点:设备有上下级关系、工艺流程呈树状结构,如何用SQL优雅地查询出完整的层级关系?
传统的表连接查询面对多层嵌套时显得力不从心,递归存储过程又过于复杂。今天就来揭秘SQL Server的CTE递归查询这个利器,让你轻松处理任何深度的树形数据结构!
无论你是要查询某个设备下的所有子设备,还是要追溯工艺流程的完整路径,本文将通过实战案例,让你彻底掌握CTE递归查询的精髓。
🔍 问题分析:树形数据查询的三大痛点
痛点1:层级深度不确定
在实际业务中,设备层级可能有3层、5层,甚至更深。用传统JOIN方式需要写N个表连接,代码冗长且不灵活。
痛点2:向上向下查询需求并存
既要能从叶子节点向上追溯到根节点,又要能从根节点向下展开所有子节点,单一查询方式无法满足。
痛点3:性能与可读性难以兼顾
递归存储过程性能好但代码复杂,简单查询可读性强但性能差,需要找到平衡点。
🛠️ 解决方案:CTE递归查询的5大实战技巧
📋 数据准备:构建测试环境
首先创建设备层级表和工艺流程表:
SQL-- 创建设备层级表
CREATE TABLE Equipment (
EquipmentID INT PRIMARY KEY,
EquipmentName NVARCHAR(100),
ParentID INT,
Level INT,
CreateDate DATETIME DEFAULT GETDATE()
);
-- 插入测试数据
INSERT INTO Equipment VALUES
(1, '生产线A', NULL, 1, '2024-01-01'),
(2, '工作站A1', 1, 2, '2024-01-02'),
(3, '工作站A2', 1, 2, '2024-01-03'),
(4, '设备A1-1', 2, 3, '2024-01-04'),
(5, '设备A1-2', 2, 3, '2024-01-05'),
(6, '传感器A1-1-1', 4, 4, '2024-01-06'),
(7, '传感器A1-1-2', 4, 4, '2024-01-07');
-- 创建工艺流程表
CREATE TABLE ProcessFlow (
ProcessID INT PRIMARY KEY,
ProcessName NVARCHAR(100),
ParentProcessID INT,
Sequence INT,
Duration INT -- 工序耗时(分钟)
);
-- 插入工艺流程数据
INSERT INTO ProcessFlow VALUES
(1, '产品制造', NULL, 1, 0),
(2, '原料准备', 1, 1, 30),
(3, '加工处理', 1, 2, 60),
(4, '质量检测', 1, 3, 20),
(5, '物料投入', 2, 1, 10),
(6, '预处理', 2, 2, 20),
(7, '粗加工', 3, 1, 30),
(8, '精加工', 3, 2, 30);
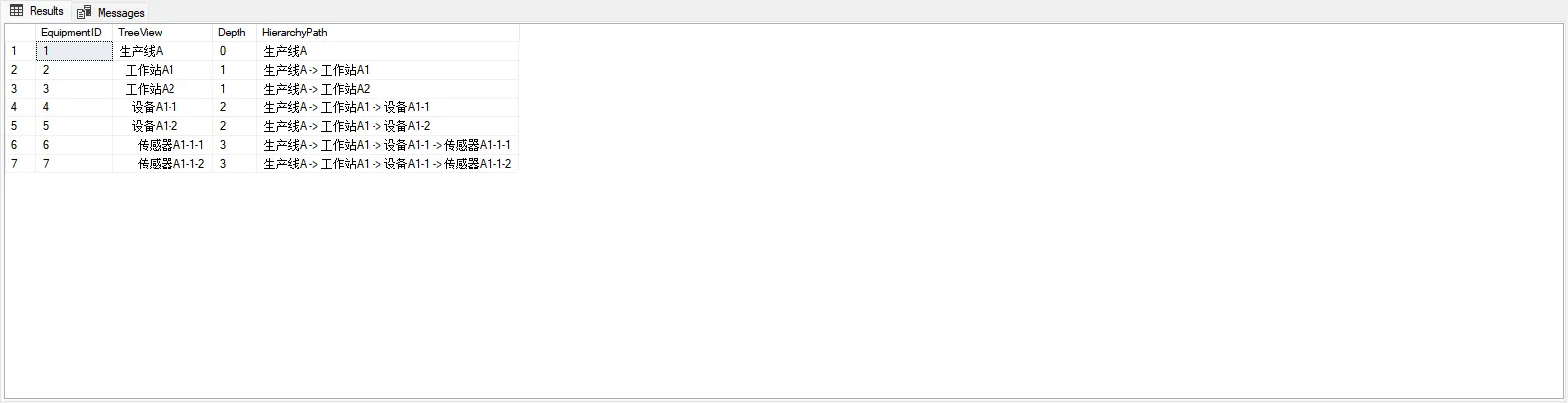
🔥 技巧一:向下递归查询子设备
场景:查询某个设备及其所有下级设备
SQL-- 查询设备ID=1的所有下级设备
WITH EquipmentHierarchy AS (
-- 锚点:找到起始设备
SELECT
EquipmentID,
EquipmentName,
ParentID,
Level,
0 as Depth,
CAST(EquipmentName AS NVARCHAR(500)) as HierarchyPath
FROM Equipment
WHERE EquipmentID = 1
UNION ALL
-- 递归:找到所有子设备
SELECT
e.EquipmentID,
e.EquipmentName,
e.ParentID,
e.Level,
eh.Depth + 1,
CAST(eh.HierarchyPath + ' -> ' + e.EquipmentName AS NVARCHAR(500))
FROM Equipment e
INNER JOIN EquipmentHierarchy eh ON e.ParentID = eh.EquipmentID
)
SELECT
EquipmentID,
REPLICATE(' ', Depth) + EquipmentName as TreeView,
Depth,
HierarchyPath
FROM EquipmentHierarchy
ORDER BY Depth, EquipmentID;