
目录
🏭 当你的代码开始"反噬"你
三年前,我接手过一个工控项目的维护工作。打开代码的第一眼——一个主文件,2800行,没有注释,变量名清一色a1、tmp2、flag_x。设备驱动、业务逻辑、界面刷新全搅在一起,像一锅放了三天的炖菜。
改一个传感器采样频率,结果搞崩了报警模块。
这不是极端案例。工控、自动化、工业软件领域,这种代码随处可见。原因很现实:项目紧、人手少、能跑就行。但技术债是有利息的——统计显示,代码维护成本往往占到项目整个生命周期的47%以上,而可读性差的代码,维护耗时是规范代码的3倍不止。
本文不讲大道理,只讲在Windows工业Python开发中,真正能落地、能救命的代码规范。从命名到架构,从日志到测试,每一条都是血泪换来的。
🔤 命名:代码的第一张脸
变量名是给人看的,不是给机器看的。机器不在乎你叫它x还是motor_speed_rpm,但三个月后回来维护的你,会在乎。
工业场景下的命名原则
工控代码有个独特的挑战:物理量必须带单位。这是我见过最多、也最容易踩的坑。
python# ❌ 这种写法,三个月后你自己都不认识
timeout = 30
speed = 1200
pressure = 0.5
# ✅ 单位入名,一目了然
timeout_sec = 30
motor_speed_rpm = 1200
hydraulic_pressure_mpa = 0.5
不只是单位。设备状态、通信协议、寄存器地址——这些工业特有的概念,命名时都要"说人话":
python# ❌ 抽象到失去意义
REG_01 = 0x0100
FLAG_A = True
DATA = [0x01, 0x02, 0x03]
# ✅ 语义清晰,维护友好
MODBUS_HOLDING_REG_TEMP = 0x0100 # 温度保持寄存器地址
plc_emergency_stop_active = True # 急停状态标志
motor_control_frame = [0x01, 0x02, 0x03] # 电机控制报文
一个小习惯:布尔变量用is_、has_、can_开头。device_connected和is_device_connected,后者读起来像一句话,前者像个名词堆砌。
🏗️ 分层架构:把"意大利面"变成"千层糕"
这是工控软件里最值得投入精力的地方。不分层,代码迟早乱成一团;分层不合理,改一处动全身。
工业Python项目,我推荐三层结构:
project/ ├── hardware/ # 硬件抽象层(HAL) │ ├── serial_comm.py │ ├── modbus_client.py │ └── gpio_controller.py ├── business/ # 业务逻辑层 │ ├── process_control.py │ ├── alarm_manager.py │ └── data_recorder.py └── interface/ # 界面/接口层 ├── main_window.py └── api_server.py
每层只干自己的事。硬件层不懂业务,业务层不碰界面。听起来简单,做起来需要克制——尤其是赶进度的时候,"先放这里,以后再整理"是最危险的想法。
硬件抽象层:让设备可替换
pythonfrom abc import ABC, abstractmethod
from dataclasses import dataclass
from typing import Optional
import logging
import time
import random
logging.basicConfig(
level=logging.INFO,
format="%(asctime)s [%(levelname)s] %(name)s: %(message)s"
)
logger = logging.getLogger(__name__)
# 数据类 & 基类
@dataclass
class DeviceStatus:
"""设备状态数据类"""
is_connected: bool
temperature_celsius: float
error_code: Optional[int] = None
last_update_timestamp: float = 0.0
class BaseDeviceDriver(ABC):
"""设备驱动基类——所有硬件驱动必须继承这个"""
def __init__(self, device_id: str, port: str):
self.device_id = device_id
self.port = port
self._is_initialized = False
@abstractmethod
def connect(self) -> bool:
"""建立设备连接"""
pass
@abstractmethod
def read_status(self) -> DeviceStatus:
"""读取设备状态"""
pass
@abstractmethod
def send_command(self, command: bytes) -> bool:
"""发送控制指令"""
pass
def disconnect(self) -> None:
"""断开连接——提供默认实现,子类可覆盖"""
self._is_initialized = False
logger.info(f"设备 {self.device_id} 已断开连接")
# 具体驱动实现(Mock)
class MockSensorDriver(BaseDeviceDriver):
"""
模拟传感器驱动(用于测试,不依赖真实硬件)
模拟一个温度传感器,支持连接/读取/指令发送。
"""
# 支持的指令集
CMD_RESET = b"\x01\x00"
CMD_CALIBRATE = b"\x01\x01"
CMD_SHUTDOWN = b"\xFF\x00"
def __init__(self, device_id: str, port: str, simulate_error: bool = False):
super().__init__(device_id, port)
self._simulate_error = simulate_error
self._base_temperature = 25.0 # 模拟基准温度
def connect(self) -> bool:
if self._simulate_error:
logger.error(f"[{self.device_id}] 连接失败:端口 {self.port} 无响应")
return False
logger.info(f"[{self.device_id}] 正在连接端口 {self.port} ...")
time.sleep(0.1) # 模拟握手延迟
self._is_initialized = True
logger.info(f"[{self.device_id}] 连接成功")
return True
def read_status(self) -> DeviceStatus:
if not self._is_initialized:
logger.warning(f"[{self.device_id}] 尚未初始化,返回离线状态")
return DeviceStatus(
is_connected=False,
temperature_celsius=0.0,
error_code=101,
last_update_timestamp=time.time()
)
# 模拟温度浮动 ±2°C
simulated_temp = self._base_temperature + random.uniform(-2.0, 2.0)
return DeviceStatus(
is_connected=True,
temperature_celsius=round(simulated_temp, 2),
error_code=None,
last_update_timestamp=time.time()
)
def send_command(self, command: bytes) -> bool:
if not self._is_initialized:
logger.error(f"[{self.device_id}] 指令发送失败:设备未连接")
return False
cmd_map = {
self.CMD_RESET: "RESET(复位)",
self.CMD_CALIBRATE: "CALIBRATE(校准)",
self.CMD_SHUTDOWN: "SHUTDOWN(关机)",
}
cmd_name = cmd_map.get(command, f"UNKNOWN(0x{command.hex()})")
logger.info(f"[{self.device_id}] 执行指令:{cmd_name}")
if command == self.CMD_SHUTDOWN:
self.disconnect()
return True
def disconnect(self) -> None:
"""覆盖基类,增加资源清理逻辑"""
logger.info(f"[{self.device_id}] 正在释放端口 {self.port} 资源...")
super().disconnect()
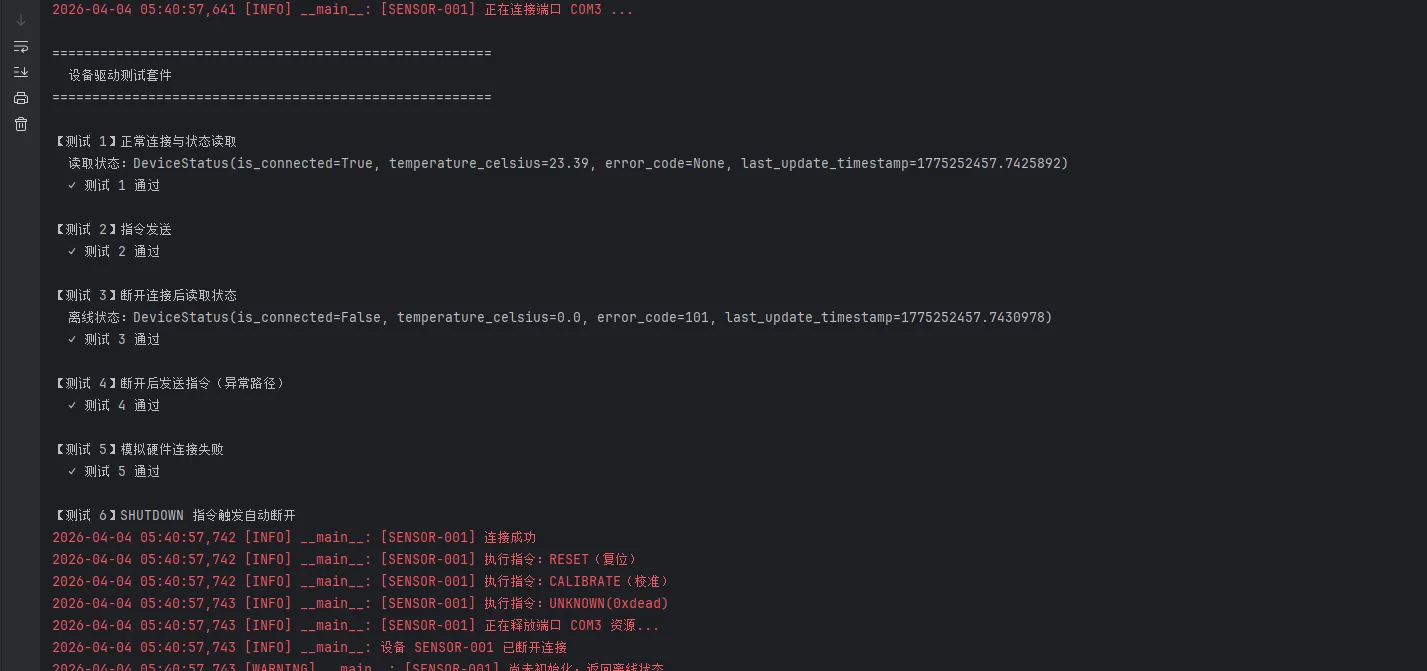
# 测试用例
def run_tests():
print("\n" + "=" * 55)
print(" 设备驱动测试套件")
print("=" * 55)
# ── 测试 1:正常连接与状态读取 ──
print("\n【测试 1】正常连接与状态读取")
driver = MockSensorDriver(device_id="SENSOR-001", port="COM3")
assert driver.connect() is True, "连接应返回 True"
assert driver._is_initialized is True, "初始化标志应为 True"
status = driver.read_status()
assert status.is_connected is True, "状态应显示已连接"
assert status.error_code is None, "正常状态不应有错误码"
assert 23.0 <= status.temperature_celsius <= 27.0, "温度应在合理范围内"
assert status.last_update_timestamp > 0, "时间戳应被写入"
print(f" 读取状态:{status}")
print(" ✓ 测试 1 通过")
# ── 测试 2:指令发送 ──
print("\n【测试 2】指令发送")
assert driver.send_command(MockSensorDriver.CMD_RESET) is True, "复位指令应成功"
assert driver.send_command(MockSensorDriver.CMD_CALIBRATE) is True, "校准指令应成功"
assert driver.send_command(b"\xDE\xAD") is True, "未知指令也应被接受(容错)"
print(" ✓ 测试 2 通过")
# ── 测试 3:主动断开后读取状态 ──
print("\n【测试 3】断开连接后读取状态")
driver.disconnect()
assert driver._is_initialized is False, "断开后初始化标志应为 False"
offline_status = driver.read_status()
assert offline_status.is_connected is False, "断开后状态应为未连接"
assert offline_status.error_code == 101, "应返回错误码 101"
print(f" 离线状态:{offline_status}")
print(" ✓ 测试 3 通过")
# ── 测试 4:断开后发送指令 ──
print("\n【测试 4】断开后发送指令(异常路径)")
result = driver.send_command(MockSensorDriver.CMD_RESET)
assert result is False, "未连接时指令应返回 False"
print(" ✓ 测试 4 通过")
# ── 测试 5:模拟连接失败 ──
print("\n【测试 5】模拟硬件连接失败")
faulty_driver = MockSensorDriver(
device_id="SENSOR-ERR", port="COM99", simulate_error=True
)
assert faulty_driver.connect() is False, "故障设备连接应返回 False"
assert faulty_driver._is_initialized is False, "初始化标志应保持 False"
print(" ✓ 测试 5 通过")
# ── 测试 6:SHUTDOWN 指令自动断开 ──
print("\n【测试 6】SHUTDOWN 指令触发自动断开")
driver2 = MockSensorDriver(device_id="SENSOR-002", port="COM4")
driver2.connect()
driver2.send_command(MockSensorDriver.CMD_SHUTDOWN)
assert driver2._is_initialized is False, "SHUTDOWN 后设备应自动断开"
print(" ✓ 测试 6 通过")
print("\n" + "=" * 55)
print(" 全部 6 项测试通过")
print("=" * 55 + "\n")
if __name__ == "__main__":
run_tests()
这个基类的价值在于:换设备型号时,新驱动只要继承BaseDeviceDriver,业务层代码一行不用改。这就是抽象的意义。
🛡️ 异常处理:工控代码的生命线
普通软件崩了,重启就好。工控软件崩了——设备可能还在转,可能停在危险位置,可能正在向外喷液体。
异常处理在工控领域不是"加分项",是"及格线"。
分级异常体系
pythonclass IndustrialBaseError(Exception):
"""工业控制异常基类"""
def __init__(self, message: str, device_id: str = "", error_code: int = 0):
super().__init__(message)
self.device_id = device_id
self.error_code = error_code
self.timestamp = time.time()
class DeviceCommunicationError(IndustrialBaseError):
"""设备通信异常——串口断开、网络超时等"""
pass
class SafetyInterlockError(IndustrialBaseError):
"""安全联锁异常——这个必须立刻停机"""
pass
class ProcessParameterError(IndustrialBaseError):
"""工艺参数越限——温度、压力超出安全范围"""
pass
为什么要自定义异常层级?因为不同级别的异常,处理策略完全不同。通信超时,可以重试;安全联锁触发,必须立刻急停,不能重试,不能忽略。
pythondef safe_device_operation(driver: BaseDeviceDriver, command: bytes) -> bool:
"""带完整异常处理的设备操作"""
max_retry_count = 3
retry_delay_sec = 0.5
for attempt in range(max_retry_count):
try:
success = driver.send_command(command)
if success:
logger.info(f"指令发送成功,设备: {driver.device_id}")
return True
except SafetyInterlockError as e:
# 安全异常:不重试,直接触发急停
logger.critical(f"安全联锁触发!设备: {e.device_id}, 错误码: {e.error_code}")
trigger_emergency_stop(e.device_id)
raise # 继续向上传播,不要吞掉
except DeviceCommunicationError as e:
logger.warning(f"通信失败,第{attempt + 1}次重试,设备: {e.device_id}")
if attempt < max_retry_count - 1:
time.sleep(retry_delay_sec)
else:
logger.error(f"重试{max_retry_count}次后仍失败,设备: {e.device_id}")
return False
return False
注意那个raise——安全类异常绝对不能被静默吞掉。这是工控代码里最容易犯的错误之一。
📊 日志系统:事后追溯的救命稻草
设备在凌晨三点出问题了,你不在现场。你唯一能依赖的,就是日志。
结构化日志配置
pythonimport logging
import logging.handlers
import time
import random
import traceback
from pathlib import Path
from dataclasses import dataclass, field
from typing import Optional
from enum import Enum
# 1. 日志配置
def setup_industrial_logger(
log_dir: str = "logs",
app_name: str = "industrial_control",
max_file_size_mb: int = 50,
backup_count: int = 10,
) -> logging.Logger:
"""
工业控制系统日志配置
特点:
- 按大小自动轮转,防止磁盘撑爆
- 同时输出到文件和控制台
- 包含时间戳、模块名、行号
- 新增:CRITICAL 单独写入 error.log,便于告警系统监控
"""
log_path = Path(log_dir)
log_path.mkdir(parents=True, exist_ok=True)
logger = logging.getLogger(app_name)
logger.setLevel(logging.DEBUG)
# 防止重复添加 handler(多次调用时)
if logger.handlers:
return logger
# 详细格式——工控日志必须有毫秒级时间戳
detailed_formatter = logging.Formatter(
fmt="%(asctime)s.%(msecs)03d | %(levelname)-8s | %(name)s:%(lineno)d | %(message)s",
datefmt="%Y-%m-%d %H:%M:%S",
)
# ① 文件处理器:按大小轮转(DEBUG 及以上全量记录)
file_handler = logging.handlers.RotatingFileHandler(
filename=log_path / f"{app_name}.log",
maxBytes=max_file_size_mb * 1024 * 1024,
backupCount=backup_count,
encoding="utf-8",
)
file_handler.setLevel(logging.DEBUG)
file_handler.setFormatter(detailed_formatter)
# ② 控制台处理器:只显示 INFO 以上
console_handler = logging.StreamHandler()
console_handler.setLevel(logging.INFO)
console_handler.setFormatter(detailed_formatter)
# ③ 错误专用文件:只记录 ERROR / CRITICAL,供告警系统扫描
error_handler = logging.handlers.RotatingFileHandler(
filename=log_path / f"{app_name}_error.log",
maxBytes=10 * 1024 * 1024, # 10 MB 足够
backupCount=5,
encoding="utf-8",
)
error_handler.setLevel(logging.ERROR)
error_handler.setFormatter(detailed_formatter)
logger.addHandler(file_handler)
logger.addHandler(console_handler)
logger.addHandler(error_handler)
return logger
# 2. 业务领域模型
class DeviceStatus(Enum):
IDLE = "IDLE"
RUNNING = "RUNNING"
WARNING = "WARNING"
FAULT = "FAULT"
SHUTDOWN = "SHUTDOWN"
@dataclass
class SensorReading:
device_id: str
temperature: float # °C
pressure: float # bar
vibration: float # mm/s
timestamp: float = field(default_factory=time.time)
def to_log_str(self) -> str:
return (
f"device={self.device_id} "
f"temp={self.temperature:.2f}°C "
f"pressure={self.pressure:.3f}bar "
f"vibration={self.vibration:.4f}mm/s"
)
# 3. 阈值配置
@dataclass
class AlarmThreshold:
temp_warning: float = 80.0
temp_critical: float = 95.0
pressure_warning: float = 8.0
pressure_critical: float = 10.0
vibration_warning: float = 2.5
vibration_critical: float = 4.0
# 4. 核心控制器
class IndustrialController:
"""模拟工业设备控制器,负责采集、判断、记录"""
def __init__(
self,
device_id: str,
logger: logging.Logger,
threshold: Optional[AlarmThreshold] = None,
):
self.device_id = device_id
self.logger = logger.getChild(device_id) # 子 logger,name 自动带上设备 ID
self.threshold = threshold or AlarmThreshold()
self.status = DeviceStatus.IDLE
self._cycle_count = 0
# ── 状态变更 ──────────────────────────────
def _set_status(self, new_status: DeviceStatus) -> None:
if new_status != self.status:
self.logger.info(
"STATUS_CHANGE | %s -> %s", self.status.value, new_status.value
)
self.status = new_status
# ── 传感器数据校验 ────────────────────────
def _validate_reading(self, reading: SensorReading) -> bool:
"""粗略合法性检查,过滤传感器故障数据"""
if not (-50 <= reading.temperature <= 200):
self.logger.error(
"SENSOR_FAULT | temp=%.2f out of physical range", reading.temperature
)
return False
if reading.pressure < 0:
self.logger.error(
"SENSOR_FAULT | pressure=%.3f negative value", reading.pressure
)
return False
return True
# ── 告警判断 ──────────────────────────────
def _check_alarms(self, reading: SensorReading) -> DeviceStatus:
t = self.threshold
status = DeviceStatus.RUNNING
# 温度
if reading.temperature >= t.temp_critical:
self.logger.critical(
"ALARM_CRITICAL | OVER_TEMP | %s", reading.to_log_str()
)
status = DeviceStatus.FAULT
elif reading.temperature >= t.temp_warning:
self.logger.warning(
"ALARM_WARNING | HIGH_TEMP | %s", reading.to_log_str()
)
status = max(status, DeviceStatus.WARNING, key=lambda s: s.value)
# 压力
if reading.pressure >= t.pressure_critical:
self.logger.critical(
"ALARM_CRITICAL | OVER_PRESSURE | %s", reading.to_log_str()
)
status = DeviceStatus.FAULT
elif reading.pressure >= t.pressure_warning:
self.logger.warning(
"ALARM_WARNING | HIGH_PRESSURE | %s", reading.to_log_str()
)
# 振动
if reading.vibration >= t.vibration_critical:
self.logger.critical(
"ALARM_CRITICAL | OVER_VIBRATION | %s", reading.to_log_str()
)
status = DeviceStatus.FAULT
elif reading.vibration >= t.vibration_warning:
self.logger.warning(
"ALARM_WARNING | HIGH_VIBRATION | %s", reading.to_log_str()
)
return status
# 单次采集处理
def process_reading(self, reading: SensorReading) -> None:
self._cycle_count += 1
self.logger.debug(
"CYCLE #%04d | RAW | %s", self._cycle_count, reading.to_log_str()
)
if not self._validate_reading(reading):
self._set_status(DeviceStatus.FAULT)
return
new_status = self._check_alarms(reading)
self._set_status(new_status)
if self.status == DeviceStatus.FAULT:
self.logger.error(
"DEVICE_FAULT | Halting device %s at cycle #%d",
self.device_id,
self._cycle_count,
)
# 启停接口
def start(self) -> None:
self._set_status(DeviceStatus.RUNNING)
self.logger.info("DEVICE_START | %s initialized", self.device_id)
def shutdown(self) -> None:
self._set_status(DeviceStatus.SHUTDOWN)
self.logger.info(
"DEVICE_STOP | %s stopped after %d cycles",
self.device_id,
self._cycle_count,
)
# 5. 模拟数据源
def simulate_sensor(device_id: str, inject_fault: bool = False) -> SensorReading:
"""生成模拟传感器读数,inject_fault=True 时随机注入超限值"""
base_temp = random.uniform(60, 85)
base_pressure = random.uniform(5.0, 9.0)
base_vibration = random.uniform(0.5, 3.0)
if inject_fault:
fault_type = random.choice(["temp", "pressure", "vibration", "sensor_error"])
if fault_type == "temp":
base_temp = random.uniform(90, 110)
elif fault_type == "pressure":
base_pressure = random.uniform(9.5, 12.0)
elif fault_type == "vibration":
base_vibration = random.uniform(3.5, 6.0)
elif fault_type == "sensor_error":
base_temp = 999.0 # 明显的传感器故障值
return SensorReading(
device_id=device_id,
temperature=base_temp,
pressure=base_pressure,
vibration=base_vibration,
)
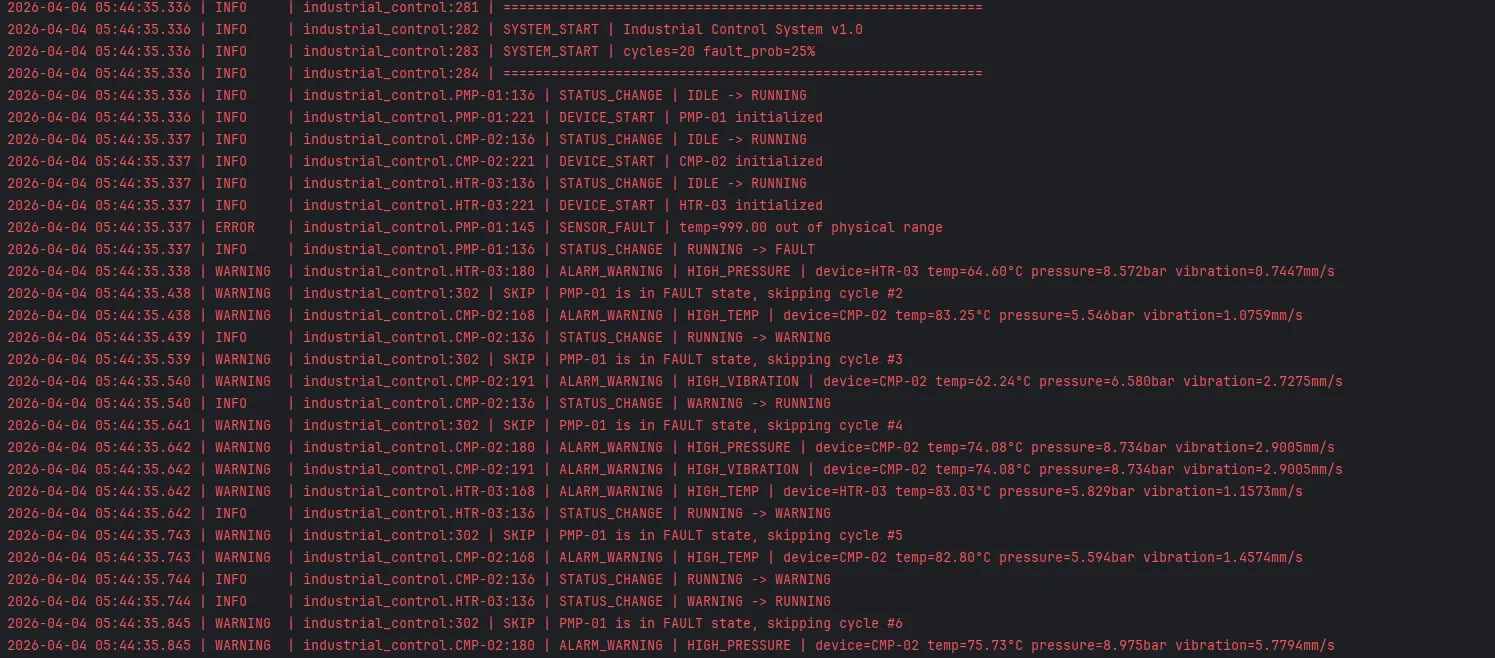
# 6. 主循环
def run_control_loop(
cycles: int = 20,
fault_probability: float = 0.25,
poll_interval: float = 0.1,
) -> None:
"""
模拟工控主循环
Args:
cycles: 运行周期数
fault_probability: 每个周期注入故障的概率
poll_interval: 采集间隔(秒),生产环境通常 100ms~1s
"""
logger = setup_industrial_logger(
log_dir="logs",
app_name="industrial_control",
max_file_size_mb=50,
backup_count=10,
)
logger.info("=" * 60)
logger.info("SYSTEM_START | Industrial Control System v1.0")
logger.info("SYSTEM_START | cycles=%d fault_prob=%.0f%%", cycles, fault_probability * 100)
logger.info("=" * 60)
device_ids = ["PMP-01", "CMP-02", "HTR-03"]
controllers = {
did: IndustrialController(did, logger) for did in device_ids
}
# 启动所有设备
for ctrl in controllers.values():
ctrl.start()
try:
for cycle in range(1, cycles + 1):
logger.debug("─── SCAN CYCLE #%04d ───", cycle)
for did, ctrl in controllers.items():
# 已故障的设备跳过采集
if ctrl.status == DeviceStatus.FAULT:
logger.warning("SKIP | %s is in FAULT state, skipping cycle #%d", did, cycle)
continue
inject = random.random() < fault_probability
reading = simulate_sensor(did, inject_fault=inject)
try:
ctrl.process_reading(reading)
except Exception:
# 捕获任何意外异常,记录完整堆栈,不让主循环崩溃
logger.error(
"UNHANDLED_EXCEPTION | device=%s cycle=%d\n%s",
did,
cycle,
traceback.format_exc(),
)
time.sleep(poll_interval)
except KeyboardInterrupt:
logger.info("SYSTEM | KeyboardInterrupt received, shutting down gracefully...")
finally:
# 无论正常还是异常退出,都执行关机流程
for ctrl in controllers.values():
ctrl.shutdown()
logger.info("SYSTEM_STOP | All devices shut down. Total cycles: %d", cycles)
logger.info("=" * 60)
# 7. 入口
if __name__ == "__main__":
run_control_loop(cycles=20, fault_probability=0.25, poll_interval=0.1)
日志内容上,有个原则:记录"发生了什么",而不只是"出错了"。
python# ❌ 没有上下文,事后根本没法排查
logger.error("读取失败")
logger.info("完成")
# ✅ 完整上下文,一眼定位问题
logger.error(
f"温度传感器读取失败 | 设备: {sensor_id} | "
f"寄存器: 0x{register_addr:04X} | 重试次数: {retry_count} | "
f"错误: {error_msg}"
)
logger.info(
f"批次处理完成 | 批次号: {batch_id} | "
f"处理数量: {processed_count} | 耗时: {elapsed_ms:.1f}ms"
)
📐 代码审查清单:上线前的最后防线
在Windows工业Python项目中,我们团队用一份精简的审查清单,每次提交前对照检查:
命名与可读性
- 变量名是否包含物理单位(如
_rpm、_mpa、_sec) - 布尔变量是否以
is_/has_/can_开头 - 函数名是否准确描述其行为(动词+名词)
异常处理
- 安全类异常是否有独立处理分支
- 是否存在空的
except块(这是大忌) - 异常日志是否包含足够的上下文信息
资源管理
- 串口、文件、数据库连接是否使用
with语句管理 - 线程、定时器是否有明确的停止机制
- 是否存在可能的内存泄漏点
测试覆盖
- 新增功能是否有对应的单元测试
- 异常路径是否有测试用例
- Mock是否正确模拟了硬件行为
🎯 写在最后
代码规范这件事,从来不是一次性的。不是写完这篇文章、读完这些规则,明天的代码就变好了。它是一种习惯,需要在每一次命名、每一个函数、每一次提交时刻意练习。
工业软件的特殊性在于——它的"用户"不只是操作员,还有设备、生产线、甚至人身安全。一个命名混乱的变量,一个被吞掉的异常,在普通软件里可能只是一个bug,在工控场景里可能是一次事故。
从今天起,给你的物理量加上单位后缀。就这一件事,先做到。
相关技术标签:#Python工业开发 #代码规范 #工控软件 #软件架构 #单元测试
本文作者:技术老小子
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!