
目录
SURF简介
SURF(Speeded Up Robust Features)是一种计算机视觉中的局部特征检测器和描述符。它于2006年由Herbert Bay等人首次提出,旨在加速SIFT(Scale-Invariant Feature Transform)算法。SURF算法在保持高性能的同时,显著提高了计算速度。
SURF的主要目标是在不同的图像中检测和匹配关键点。这些关键点是图像中独特和稳定的特征,即使在图像发生旋转、缩放或光照变化时也能保持不变。
SURF的特点
- 速度快:SURF比SIFT快很多,这主要归功于其使用积分图像和盒子滤波器。
- 尺度和旋转不变性:SURF能够检测和描述在不同尺度和旋转下的特征点。
- 光照和视角变化的鲁棒性:对光照变化和小幅度的视角变化具有良好的适应性。
- 特征描述符:SURF生成64维或128维的特征描述符,用于后续的匹配过程。
- 基于Haar小波:使用Haar小波响应来进行特征描述,提高了效率。
- 多尺度分析:通过构建尺度空间金字塔来实现多尺度特征检测。
在OpenCvSharp中使用SURF
在OpenCvSharp中使用SURF需要注意,由于专利原因,SURF算法在OpenCV 3.0之后的版本中被移到了opencv_contrib模块。因此,要使用SURF,你需要确保你的OpenCvSharp版本包含了这个额外模块。
以下是在OpenCvSharp中使用SURF的基本步骤:
引入必要的命名空间:
C#using OpenCvSharp;
using OpenCvSharp.XFeatures2D;
创建SURF对象:
C#var surf = SURF.Create(hessianThreshold: 100);
检测关键点:
C#using var image = new Mat("path/to/your/image.jpg", ImreadModes.Grayscale);
KeyPoint[] keypoints = surf.Detect(image);
计算描述符:
C#Mat descriptors = new Mat();
surf.Compute(image, ref keypoints, descriptors);
SURF应用示例
特征点检测和描述

以下是一个完整的例子,展示如何使用SURF检测图像中的特征点并计算其描述符:
C#public partial class Form4 : Form
{
private Mat originalImage;
public Form4()
{
InitializeComponent();
}
private void Form4_Load(object sender, EventArgs e)
{
}
private void btnLoadImage_Click(object sender, EventArgs e)
{
using (OpenFileDialog ofd = new OpenFileDialog())
{
ofd.Filter = "Image Files|*.jpg;*.jpeg;*.png;*.bmp";
if (ofd.ShowDialog() == DialogResult.OK)
{
originalImage = new Mat(ofd.FileName, ImreadModes.Color);
DisplayImage(originalImage);
btnDetectFeatures.Enabled = true;
}
}
}
private void btnDetectFeatures_Click(object sender, EventArgs e)
{
if (originalImage == null) return;
try
{
using (var grayImage = new Mat())
{
// 转换为灰度图
Cv2.CvtColor(originalImage, grayImage, ColorConversionCodes.BGR2GRAY);
// 创建SURF对象
var surf = SURF.Create(hessianThreshold: 100);
// 检测关键点
KeyPoint[] keypoints = surf.Detect(grayImage);
// 计算描述符
Mat descriptors = new Mat();
surf.Compute(grayImage, ref keypoints, descriptors);
// 在图像上绘制关键点
using (var outputImage = originalImage.Clone())
{
Cv2.DrawKeypoints(grayImage, keypoints, outputImage, new Scalar(0, 255, 0), DrawMatchesFlags.DrawRichKeypoints)
DisplayImage(outputImage);
MessageBox.Show($"检测到 {keypoints.Length} 个关键点\n描述符维度: {descriptors.Cols}",
"Detection Results", MessageBoxButtons.OK, MessageBoxIcon.Information);
}
}
}
catch (Exception ex)
{
MessageBox.Show($"Error: {ex.Message}", "Error", MessageBoxButtons.OK, MessageBoxIcon.Error);
}
}
private void DisplayImage(Mat image)
{
try
{
using (var bitmap = BitmapConverter.ToBitmap(image))
{
if (pic.Image != null)
{
pic.Image.Dispose();
}
pic.Image = new Bitmap(bitmap);
}
}
catch (Exception ex)
{
MessageBox.Show($"Error displaying image: {ex.Message}");
}
}
protected override void OnFormClosing(FormClosingEventArgs e)
{
base.OnFormClosing(e);
originalImage?.Dispose();
}
}
这个例子首先加载一张灰度图像,然后使用SURF检测关键点并计算描述符。最后,它在原始彩色图像上绘制这些关键点,并保存结果。
图像匹配
SURF常用于图像匹配任务。以下是一个使用SURF进行图像匹配的示例:
C#public partial class Form5 : Form
{
private string imagePath1;
private string imagePath2;
public Form5()
{
InitializeComponent();
}
// 选择第一张图片
private void btnSelectImage1_Click(object sender, EventArgs e)
{
using (OpenFileDialog ofd = new OpenFileDialog())
{
ofd.Filter = "图片文件|*.jpg;*.png;*.bmp";
if (ofd.ShowDialog() == DialogResult.OK)
{
imagePath1 = ofd.FileName;
pic1.ImageLocation = imagePath1;
}
}
}
// 选择第二张图片
private void btnSelectImage2_Click(object sender, EventArgs e)
{
using (OpenFileDialog ofd = new OpenFileDialog())
{
ofd.Filter = "图片文件|*.jpg;*.png;*.bmp";
if (ofd.ShowDialog() == DialogResult.OK)
{
imagePath2 = ofd.FileName;
pic2.ImageLocation = imagePath2;
}
}
}
private void btnMatch_Click(object sender, EventArgs e)
{
if (string.IsNullOrEmpty(imagePath1) || string.IsNullOrEmpty(imagePath2))
{
MessageBox.Show("请先选择两张图片!");
return;
}
try
{
// 读取图片并转换为灰度图
using (var img1 = new Mat(imagePath1, ImreadModes.Grayscale))
using (var img2 = new Mat(imagePath2, ImreadModes.Grayscale))
{
// 创建SURF特征检测器
var surf = SURF.Create(hessianThreshold: 100);
// 检测特征点和计算描述符
KeyPoint[] keypoints1, keypoints2;
Mat descriptors1 = new Mat();
Mat descriptors2 = new Mat();
surf.DetectAndCompute(img1, null, out keypoints1, descriptors1);
surf.DetectAndCompute(img2, null, out keypoints2, descriptors2);
// 创建特征匹配器
var matcher = new BFMatcher();
DMatch[] matches = matcher.Match(descriptors1, descriptors2);
// 绘制匹配结果
var imgMatches = new Mat();
Cv2.DrawMatches(img1, keypoints1, img2, keypoints2, matches, imgMatches);
// 保存并显示结果
string resultPath = "matches_result.jpg";
imgMatches.SaveImage(resultPath);
pictureBoxResult.ImageLocation = resultPath;
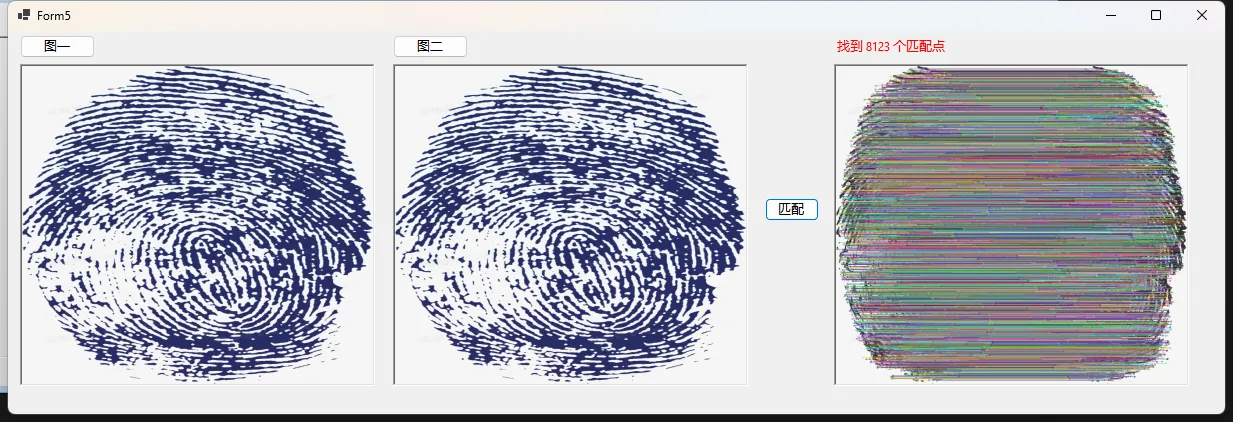
// 显示匹配点数量
lblResult.Text = $"找到 {matches.Length} 个匹配点";
}
}
catch (Exception ex)
{
MessageBox.Show($"处理过程中出错:{ex.Message}");
}
}
}
这个例子加载两张图片,使用SURF检测和描述特征点,然后使用暴力匹配器(BFMatcher)找到两张图片之间的匹配点。
对象识别
SURF可以用于简单的对象识别任务。以下是一个基本的对象识别示例:
C#using OpenCvSharp;
using OpenCvSharp.XFeatures2D;
using System;
class Program
{
static void Main(string[] args)
{
using (var objectImage = new Mat("pcb_layout.png", ImreadModes.Grayscale))
using (var sceneImage = new Mat("template.png", ImreadModes.Grayscale))
{
var surf = SURF.Create(hessianThreshold: 100);
KeyPoint[] objectKeypoints, sceneKeypoints;
Mat objectDescriptors = new Mat();
Mat sceneDescriptors = new Mat();
surf.DetectAndCompute(objectImage, null, out objectKeypoints, objectDescriptors);
surf.DetectAndCompute(sceneImage, null, out sceneKeypoints, sceneDescriptors);
var matcher = new FlannBasedMatcher();
var matches = matcher.KnnMatch(objectDescriptors, sceneDescriptors, 2);
var goodMatches = new List<DMatch>();
foreach (var m in matches)
{
if (m[0].Distance < 0.7 * m[1].Distance)
{
goodMatches.Add(m[0]);
}
}
if (goodMatches.Count >= 4)
{
Point2f[] obj = new Point2f[goodMatches.Count];
Point2f[] scene = new Point2f[goodMatches.Count];
for (int i = 0; i < goodMatches.Count; i++)
{
obj[i] = objectKeypoints[goodMatches[i].QueryIdx].Pt;
scene[i] = sceneKeypoints[goodMatches[i].TrainIdx].Pt;
}
var homography = Cv2.FindHomography(InputArray.Create(obj), InputArray.Create(scene), HomographyMethods.Ransac);
var objCorners = new Point2f[4];
objCorners[0] = new Point2f(0, 0);
objCorners[1] = new Point2f(objectImage.Cols, 0);
objCorners[2] = new Point2f(objectImage.Cols, objectImage.Rows);
objCorners[3] = new Point2f(0, objectImage.Rows);
var sceneCorners = Cv2.PerspectiveTransform(objCorners, homography);
using (var result = sceneImage.CvtColor(ColorConversionCodes.GRAY2BGR))
{
// 绘制绿色边框
Cv2.Line(result, (Point)sceneCorners[0], (Point)sceneCorners[1], new Scalar(0, 255, 0), 4);
Cv2.Line(result, (Point)sceneCorners[1], (Point)sceneCorners[2], new Scalar(0, 255, 0), 4);
Cv2.Line(result, (Point)sceneCorners[2], (Point)sceneCorners[3], new Scalar(0, 255, 0), 4);
Cv2.Line(result, (Point)sceneCorners[3], (Point)sceneCorners[0], new Scalar(0, 255, 0), 4);
// 添加文本标注
Cv2.PutText(result, "Detected Object", (Point)sceneCorners[0], HersheyFonts.HersheyComplex, 1, new Scalar(0, 255, 0), 2);
// 显示结果窗口
Cv2.ImShow("Detection Result", result);
Cv2.WaitKey(0); // 等待按键
Cv2.DestroyAllWindows(); // 关闭所有窗口
// 保存结果
result.SaveImage("object_detection_result.jpg");
}
Console.WriteLine("对象已在场景中检测到并标记");
}
else
{
Console.WriteLine("没有找到足够的好匹配点");
// 显示未找到对象的信息
using (var result = sceneImage.CvtColor(ColorConversionCodes.GRAY2BGR))
{
Cv2.PutText(result, "No Object Found", new Point(50, 50), HersheyFonts.HersheyComplex, 1, new Scalar(0, 0, 255), 2);
Cv2.ImShow("Detection Result", result);
Cv2.WaitKey(0);
Cv2.DestroyAllWindows();
}
}
}
}
}

这个例子首先加载一个对象图像和一个场景图像。它使用SURF检测两个图像中的特征点,然后使用FLANN(Fast Library for Approximate Nearest Neighbors)匹配器找到最佳匹配。之后,它使用RANSAC算法计算单应性矩阵,并在场景图像中绘制检测到的对象的边界框。
图像拼接
SURF还可以用于图像拼接任务。以下是一个简单的图像拼接示例:
C#using OpenCvSharp;
using OpenCvSharp.XFeatures2D;
class Program
{
static void Main(string[] args)
{
using (var img1 = new Mat("image1.jpg", ImreadModes.Color))
using (var img2 = new Mat("image2.jpg", ImreadModes.Color))
{
var gray1 = img1.CvtColor(ColorConversionCodes.BGR2GRAY);
var gray2 = img2.CvtColor(ColorConversionCodes.BGR2GRAY);
var surf = SURF.Create(hessianThreshold: 100);
KeyPoint[] keypoints1, keypoints2;
Mat descriptors1 = new Mat();
Mat descriptors2 = new Mat();
surf.DetectAndCompute(gray1, null, out keypoints1, descriptors1);
surf.DetectAndCompute(gray2, null, out keypoints2, descriptors2);
var matcher = new BFMatcher();
var matches = matcher.KnnMatch(descriptors1, descriptors2, 2);
var goodMatches = new List<DMatch>();
foreach (var m in matches)
{
if (m[0].Distance < 0.7 * m[1].Distance)
{
goodMatches.Add(m[0]);
}
}
var srcPoints = new Point2f[goodMatches.Count];
var dstPoints = new Point2f[goodMatches.Count];
for (int i = 0; i < goodMatches.Count; i++)
{
srcPoints[i] = keypoints1[goodMatches[i].QueryIdx].Pt;
dstPoints[i] = keypoints2[goodMatches[i].TrainIdx].Pt;
}
var homography = Cv2.FindHomography(InputArray.Create(srcPoints), InputArray.Create(dstPoints), HomographyMethods.Ransac);
var result = new Mat();
Cv2.WarpPerspective(img1, result, homography, new Size(img1.Cols + img2.Cols, img1.Rows));
img2.CopyTo(result[new Rect(0, 0, img2.Cols, img2.Rows)]);
result.SaveImage("stitched_image.jpg");
Console.WriteLine("图像拼接完成");
}
}
}
这个例子加载两张图片,使用SURF检测特征点并计算描述符。然后,它使用这些特征点来计算两张图片之间的单应性矩阵,并使用这个矩阵来将第一张图片变换到第二张图片的坐标系中。最后,它将两张图片拼接在一起。
SURF vs SIFT
虽然SURF和SIFT都是强大的特征检测和描述算法,但它们有一些关键的区别:
- 速度:SURF通常比SIFT快3倍左右。
- 特征描述符:SIFT使用128维描述符,而SURF通常使用64维描述符(也可以使用128维)。
- 尺度空间表示:SIFT使用高斯差分(DoG),而SURF使用盒子滤波器的近似。
- 特征点定位:SURF使用Hessian矩阵行列式的近似,而SIFT使用DoG极值。
- 旋转不变性:SURF可以选择是否计算旋转不变特征,而SIFT总是计算旋转不变特征。
- 专利:SIFT是专利算法,而SURF也曾经是专利算法,但现在专利已经过期。
SURF的优化和变体
- U-SURF:这是SURF的一个变体,不计算特征点的主方向,因此不具有旋转不变性,但速度更快。
- SURF-128:这是SURF的一个变体,使用128维描述符而不是标准的64维。它提供了更高的独特性,但计算成本更高。
- G-SURF:Gauge SURF是SURF的一个变体,它使用规范化的导数来提高对图像变形的鲁棒性。
- CUDA SURF:这是SURF的GPU加速版本,可以显著提高处理速度,特别是对于大型图像或实时应用。
- ORB:虽然不是SURF的直接变体,但ORB(Oriented FAST and Rotated BRIEF)可以看作是SURF和SIFT的一个替代品,它结合了FAST关键点检测器和BRIEF描述符,速度更快,而且是免费的。
SURF的局限性
尽管SURF是一个强大的算法,但它也有一些局限性:
- 专利问题:虽然SURF的专利已经过期,但在某些情况下使用它可能仍然存在法律风险。
- 非线性变换:对于严重的非线性图像变换(如严重的透视变化或弯曲),SURF的性能可能会下降。
- 计算复杂度:虽然SURF比SIFT快,但对于某些实时应用来说,它可能仍然太慢。
- 内存使用:SURF需要存储积分图像,这可能会增加内存使用。
- 参数敏感性:SURF的性能对其参数(如Hessian阈值)相当敏感,可能需要针对特定应用进行调整。
结论
SURF是一种强大而高效的特征检测和描述算法,在计算机视觉领域有广泛的应用。它在速度上相比SIFT有显著提升,同时保持了良好的性能。在OpenCvSharp中,我们可以方便地使用SURF进行各种任务,如特征点检测、图像匹配、对象识别和图像拼接等。
然而,SURF并非万能的。在选择使用SURF时,需要考虑具体的应用场景、性能需求、以及可能的法律问题。对于一些特定的应用,可能需要考虑SURF的变体或其他替代算法,如ORB。
总的来说,SURF为计算机视觉任务提供了一个强大的工具,特别是在OpenCvSharp这样的高级库的支持下,我们可以轻松地在C#项目中实现复杂的计算机视觉功能。随着计算机视觉技术的不断发展,我们可以期待看到更多基于SURF的创新应用和改进。
本文作者:技术老小子
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!